Контроллер передачи с плавкой регулировкой
Powertrain Blockset / Передача / Контроллеры Передачи
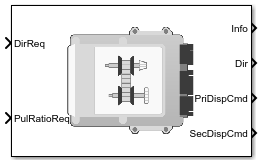
Блок CVT Controller реализует контроллер передачи с плавкой регулировкой (CVT) пояса нажатия. Блок использует стандартный шкив и геометрические уравнения, чтобы вычислить кинематические заданные значения для вариатора CVT. Можно использовать блок, чтобы управлять CVT.
Используя физические размерности системы, блок вычисляет первичные и вторичные положения вариатора, которые удовлетворяют запросу отношения шкива.
Фигура и уравнения обобщают геометрические зависимости.
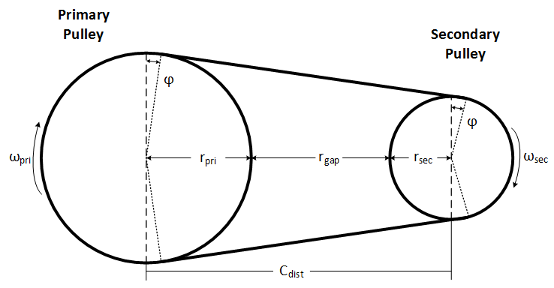
Уравнения используют эти переменные.
| ratiorequest | Запрос передаточного отношения шкива |
| ratiocommand | Команда передаточного отношения шкива, на основе запроса и физических ограничений |
| rgap | Разорвите расстояние между шкивами вариатора |
| Cdist | Расстояние между центрами шкива вариатора |
| rpmax | Максимальный вариатор первичный радиус шкива |
| rsmax | Максимальный вариатор вторичный радиус шкива |
| rpmin | Минимальный вариатор первичный радиус шкива |
| rsmin | Минимальный вариатор вторичный радиус шкива |
| ro | Начальные радиусы шкива с передаточным отношением |
| Lo | Начальная длина пояса, следуя из спецификации вариатора |
| xpri | Вариатор первичное смещение шкива, следуя из запроса контроллера |
| xsec | Вариатор вторичное смещение шкива, следуя из запроса контроллера |
| rpri | Вариатор первичный радиус шкива, следуя из запроса контроллера |
| rsec | Вариатор вторичный радиус шкива, следуя из запроса контроллера |
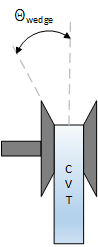
| Θwedge | Угол клина вариатора |
| Φ | Угол пояса к контактной точке шкива |
| L | Длина пояса, следуя из положения вариатора |
Разрыв между вторичными и первичными шкивами, rgap, в m. Данные показывают геометрию шкива.
Угол клина вариатора, Θwedge, в градусе.
[1] Ambekar, Ашок Г. Механизм и теория машины. Нью-Дели: Prentice Hall Индии, 2007.
[2] Бонсен, B. Оптимизация эффективности CVT пояса нажатия вариатором подсовывает управление. Кандидатская диссертация. Технический университет Эйндховена, 2006.
[3] CVT, как это работает. CVT Новая Зеландия 2 010 Ltd. 10 февраля 2011. Полученный доступ 25 апреля 2016. http://www.cvt.co.nz/cvt_how_does_it_work.htm
[4] Клаассен, T. W. G. L. CVT Empact: динамика и управление электромеханически приводимого в действие CVT. Кандидатская диссертация. Технический университет Эйндховена, 2007.
