В Simulink® можно гибко смоделировать структуру и поведение компонентов программного обеспечения для Адаптивной Платформы AUTOSAR.
Адаптивная Платформа AUTOSAR задает архитектуру для обслуживания широкого круга запросов для автомобильных компонентов, которые должны гибко адаптироваться к внешним событиям и условиям. По сравнению с Классической Платформой AUTOSAR Адаптивная Платформа требует:
Высокоэффективное вычисление, потенциально с несколькими ядрами и неоднородными типами процессора.
Быстрая коммуникация, потенциально с Ethernet или сетями на микросхемах.
Сильное основанное на сервисе взаимодействие среди компонентов.
Способность адаптировать запускающие автомобильные приложения к внешним событиям и источникам информации (потенциально для высоко автоматизированного управления), а также внешняя коммуникация, контроль и живые обновления программного обеспечения.
Адаптивная система AUTOSAR потенциально содержит несколько взаимосвязанных адаптивных компонентов программного обеспечения. Вы развертываете адаптивные компоненты программного обеспечения в среде выполнения, заданной Адаптивной Платформой, Временем выполнения AUTOSAR для Адаптивных Приложений (ARA).
Адаптивный компонент программного обеспечения AUTOSAR обеспечивает и использует сервисы. Адаптивная сервисная архитектура гибка, масштабируема, и распределенная. Сервисы могут быть обнаружены динамически и могут работать на локальных или удаленных Электронных блоках управления (ЭКЮ). Каждый компонент программного обеспечения содержит:
Автомобильный алгоритм, который выполняет задачи в ответ на полученные события.
Требуемые и обеспеченные порты, каждый сопоставленный с сервисным интерфейсом, через который события получены и отправлены.
Сервисные интерфейсы, которые служат основой для основанной на событии коммуникации, и их связанными событиями и пространствами имен.
Чтобы смоделировать адаптивный компонент программного обеспечения AUTOSAR в Simulink, вы запускаете с модели, которая содержит автомобильный алгоритм. Из той модели вы генерируете Словарь AUTOSAR, который задает сервисные интерфейсы и перспективу кода AUTOSAR, которая сопоставляет элементы модели Simulink с элементами компонента AUTOSAR. Когда вы далее разрабатываете и совершенствовали адаптивный компонент в Simulink, можно итеративно моделировать и создать модель.
Когда вы завершаете реализацию компонента, можно объединить адаптивную модель компонента программного обеспечения с другими моделями компонента в модели контейнера симуляции уровня приложения. Конечная цель должна развернуть компонент как часть приложения в среде ARA.
Вот высокоуровневый рабочий процесс для моделирования компонентов программного обеспечения на основе Адаптивной Платформы AUTOSAR.
Откройте модель Simulink, которая или пуста или содержит функциональный алгоритм.
Используя диалоговое окно Model Configuration Parameters, сконфигурируйте модель для адаптивной генерации кода AUTOSAR. Установите System target file на autosar_adaptive.tlc.
Разработайте образцовое алгоритмическое содержимое для использования в адаптивном компоненте программного обеспечения AUTOSAR. Если модель пуста, создайте или скопируйте в алгоритме. Возможные источники для алгоритмов включают алгоритмические элементы в другие модели Simulink. Примеры включают подсистемы, модели, на которые ссылаются, блоки MATLAB function и блоки Вызывающей стороны C.
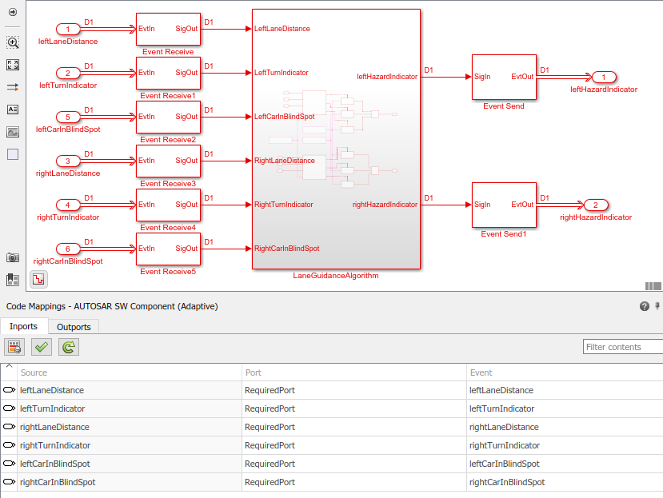
В верхнем уровне модели, настроенной основанной на событии коммуникации.
После каждого корневого импорта добавьте блок Event Receive, который преобразовывает входное событие в сигнал при сохранении значений сигналов и типа данных.
Перед каждым корневым выходным портом добавьте блок Event Send, который преобразовывает входной сигнал в событие при сохранении значений сигналов и типа данных.
Сопоставьте алгоритмическую модель с адаптивным компонентом программного обеспечения AUTOSAR. Например, в окне модели, выберите Code> C/C++ Code> Configure Model in Code Perspective. Диалоговое окно AUTOSAR Component Quick Start открывается. Когда панель Быстрого запуска предложит значение по умолчанию или задержит создание компонента, выберите Create default mapping. Чтобы сгенерировать перспективу кода AUTOSAR и Словарь AUTOSAR, нажмите кнопку Quick Start Finish.
Используя перспективу кода AUTOSAR и Словарь AUTOSAR (или эквивалентная карта AUTOSAR и функции свойства), далее совершенствуйте настройку адаптивной модели AUTOSAR.
В перспективе кода AUTOSAR исследуйте отображение импорта Simulink и выходных портов к AUTOSAR требуемые и обеспеченные порты и события.
В Словаре AUTOSAR исследуйте свойства AUTOSAR на RequiredPorts, ProvidedPorts и Сервисные Интерфейсы.
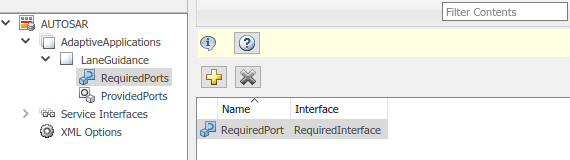
Можно расширить сервисные узлы интерфейса, чтобы исследовать их связанные события AUTOSAR и задать пространства имен для интерфейсного Кода С++.
Создайте адаптивную модель компонента программного обеспечения AUTOSAR. Создавание модели генерирует:
Файлы C++, которые реализуют образцовые алгоритмы для Адаптивной Платформы AUTOSAR и обеспечивают разделяемые данные, вводят определения.
XML-описания AUTOSAR адаптивного компонента программного обеспечения AUTOSAR и образцового заголовочного файла класса.
Файлы C++, которые реализуют основной программный модуль.
Файл CMakeLists.txt, который поддерживает генерацию CMake исполняемых файлов.
Для получения дополнительной информации смотрите, Конфигурируют Адаптивные Компоненты программного обеспечения AUTOSAR.
Событие получает | Событие отправляет
