Нули и полюса lowpass, чтобы объединить преобразование частоты M-полосы
[Z2,P2,K2,AllpassNum,AllpassDen]
= zpklpmbc(Z,P,K,Wo,Wt)
[Z2,P2,K2,AllpassNum,AllpassDen]
= zpklpmbc(Z,P,K,Wo,Wt) возвращает нули, Z 2, полюса, P 2, и фактор усиления, K 2, целевого фильтра, преобразованного от действительного прототипа lowpass путем применения th-порядка M действительный lowpass, чтобы объединить мультиполосовое преобразование частоты.
Это также возвращает числитель, AllpassNum, и знаменатель, AllpassDen, allpass, сопоставляющего фильтр. Прототип lowpass фильтр дан с нулями, Z, полюсами, P, и фактором усиления, K.
Это преобразование эффективно помещает одну функцию исходного фильтра, расположенного на частоте Во, на необходимых целевых местоположениях частоты, Wt1..., WtM.
Выбор функции, подвергающейся этому преобразованию, не ограничивается частотой среза исходного фильтра lowpass. В целом возможно выбрать любую функцию, например, ребро полосы задерживания, DC, глубокий минимум в полосе задерживания или другие единицы.
Относительные положения других функций исходного фильтра не изменяются в целевом фильтре. Это означает, что возможно выбрать две функции исходного фильтра, F1 и F2, с F1, предшествующим F2. F1 функции будет все еще предшествовать F2 после преобразования. Однако расстояние между F1 и F2 не будет тем же самым до и после преобразования.
Это преобразование может также использоваться для преобразования других типов фильтров; например, чтобы реплицировать фильтры метки и резонаторы в любом необходимом местоположении.
Разработайте прототип действительный БИХ-полуленточный фильтр с помощью стандартного эллиптического подхода:
[b, a] = ellip(3,0.1,30,0.409); z = roots(b); p = roots(a); k = b(1); [z1,p1,k1] = zpklp2mbc(z, p, k, 0.5, [2 4 6 8]/10); [z2,p2,k2] = zpklp2mbc(z, p, k, 0.5, [2 4 6 8]/10);
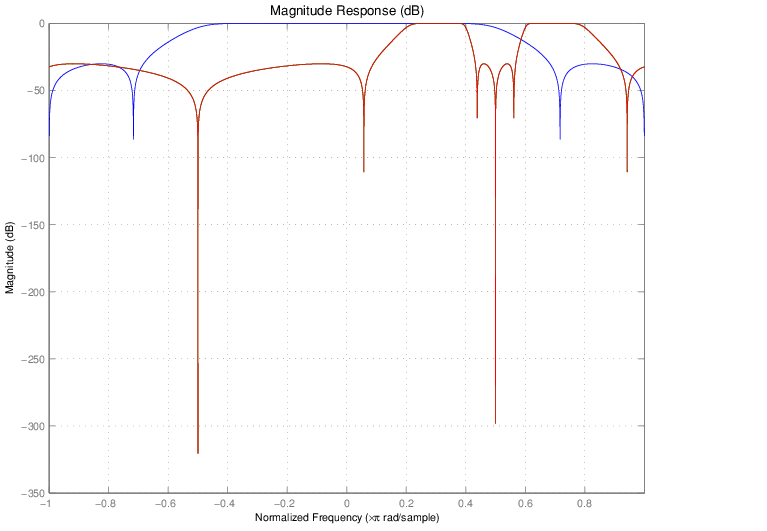
Проверьте результат путем сравнения прототипного фильтра с целевым фильтром:
fvtool(b, a, k1*poly(z1), poly(p1), k2*poly(z2), poly(p2));
Вы могли рассмотреть коэффициенты, чтобы сравнить фильтры, но графическое сравнение, показанное здесь, более быстро и легче.
Однако рассмотрение коэффициентов в FVTool показывает желаемый сложный характер.
| Переменная | Описание |
|---|---|
Z | Нули прототипа lowpass фильтр |
P | Полюса прототипа lowpass фильтр |
K | Фактор усиления прототипа lowpass фильтр |
Wo | Значение частоты, которое будет преобразовано от прототипного фильтра. Это должно быть нормировано, чтобы быть между 0 и 1 с 1 соответствием половине частоты дискретизации. |
Wt | Желаемые местоположения частоты в преобразованном целевом фильтре. Они должны быть нормированы, чтобы быть между-1 и 1 с 1 соответствием половине частоты дискретизации. |
Z2 | Нули целевого фильтра |
P2 | Полюса целевого фильтра |
K2 | Фактор усиления целевого фильтра |
AllpassNum | Числитель фильтра отображения |
AllpassDen | Знаменатель фильтра отображения |
