Анализируйте диаграмму направленности линейных, плоских, и конформных сенсорных матриц
MATLAB® Toolstrip: На вкладке Apps, под Signal Processing and Communications, кликают по значку приложения.
Подсказка команды MATLAB: Введите sensorArrayAnalyzer.
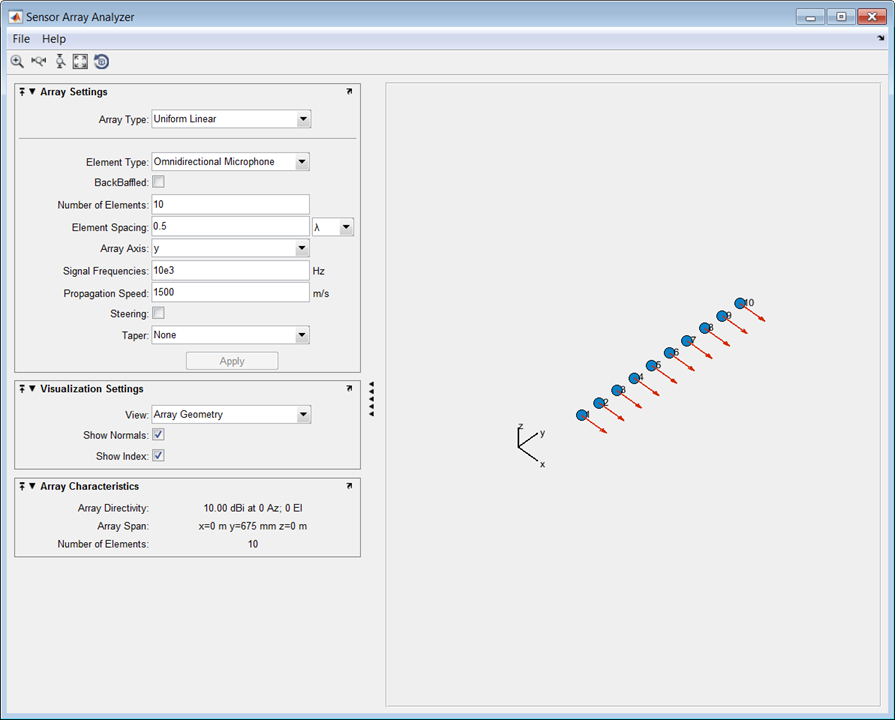
Этот пример показывает, как анализировать универсальную линейную матрицу (ULA) с 10 элементами в приложении гидролокатора с ненаправленными микрофонами.
Универсальная линейная матрица имеет элементы датчика, которые равномерно распределены вдоль строки.
Установите Array Type на Uniform Linear и Element Type к Omnidirectional Microphone.
Разработайте массив, чтобы найти направление прибытия сигнала на 10 кГц установкой Signal Frequencies к 10000 и Element Spacing к 0,5 длинам волн.
Установите Propagation Speed сигнала равняться скорости звука в воде, 1500 m/s.
В выпадающем меню View выберите опцию Array Geometry, чтобы чертить форму массива.
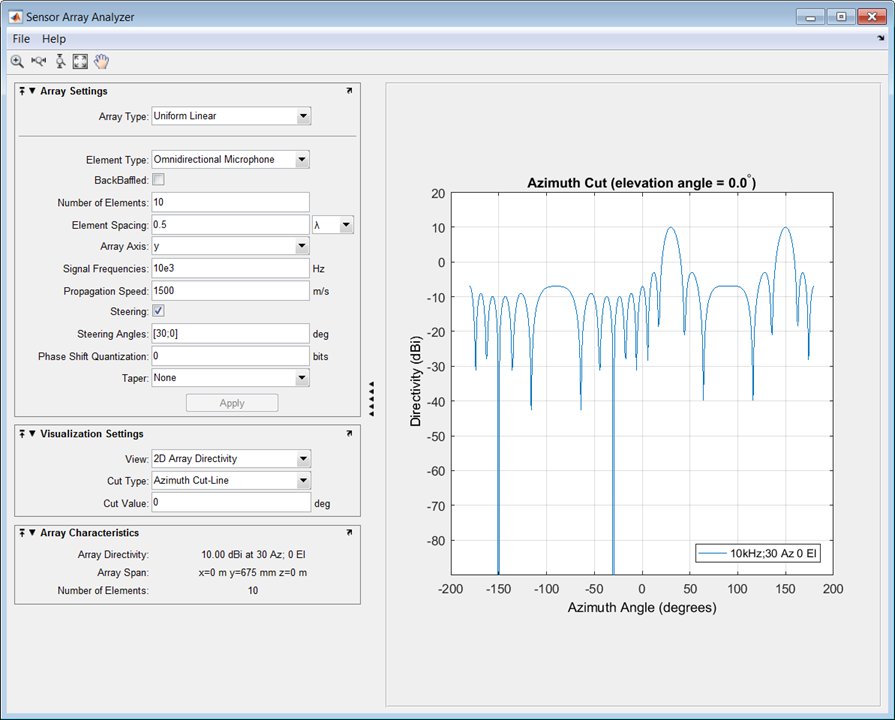
Затем, исследуйте направленность массива. Для этого выберите 2D Array Directivity в View выпадающий список. 2D направленность массивов показывают ниже.
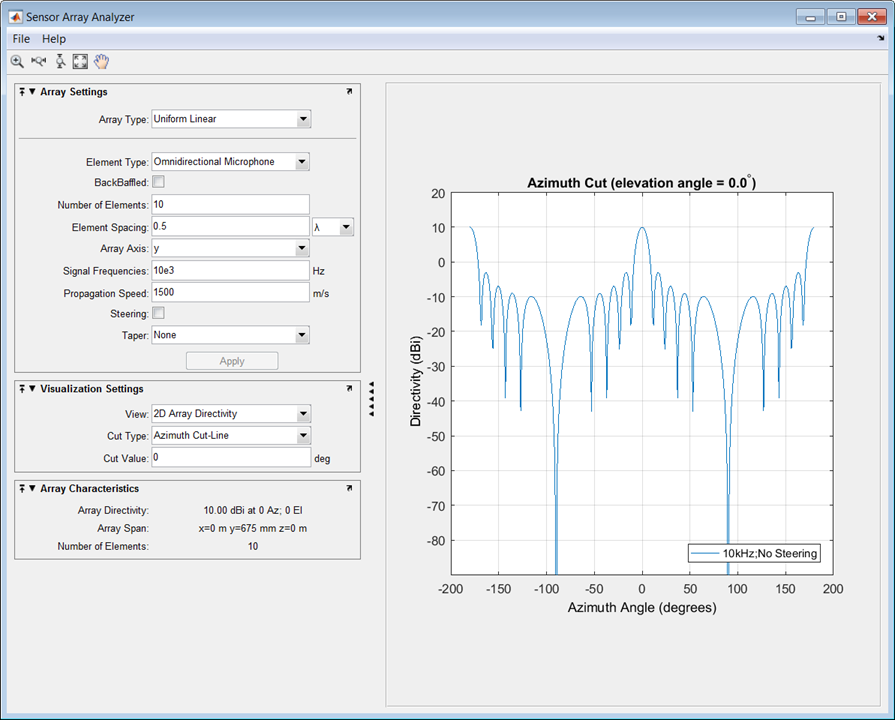
Вы видите mainlobe функции направленности массивов (также названный основным лучом) на уровне 0 ° и другим mainlobe на уровне ±180 °. Два mainlobes появляются из-за цилиндрической симметрии массива ULA.
beamscanner работает путем последовательного обращения массива mainlobe в различных направлениях. Установка опции Steering к On позволяет вам регулировать mainlobe в направлении, заданном опцией Steering Angles.
В этом случае установите держащийся угол на [30;0] указывать mainlobe на 30 ° в азимуте и повышении на 0 °. В следующей фигуре вы видите два mainlobes, один на уровне 30 ° как ожидалось, и другого на уровне 150 °. Снова, два mainlobes появляются из-за цилиндрической симметрии массива.
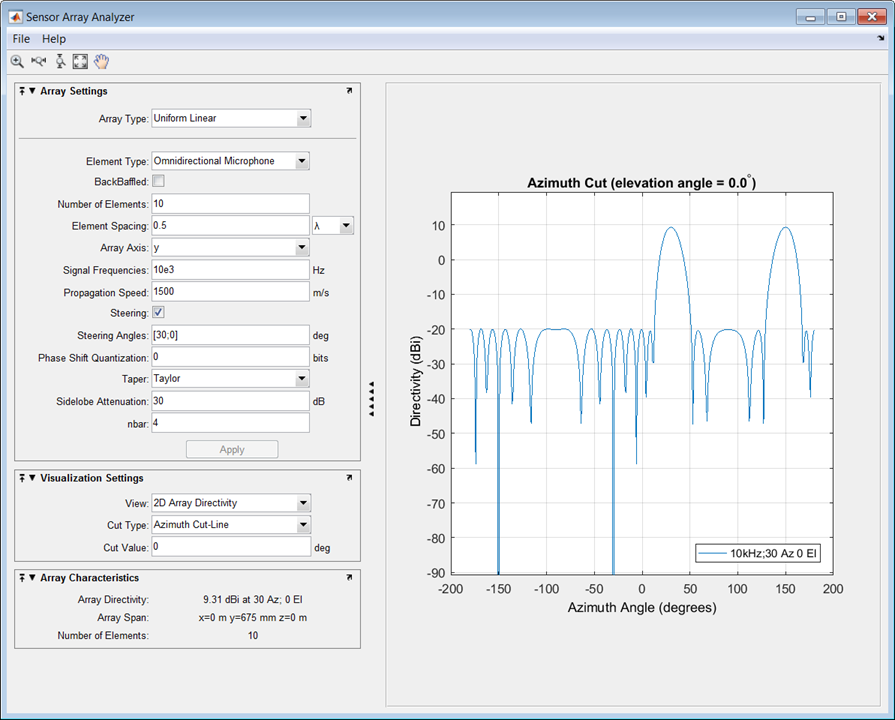
Недостаток ULA является своими большими лепестками стороны. Исследование направленности массивов показывает два лепестка стороны близко к каждому mainlobe, каждый вниз приблизительно на только 13 дБ. Сильный боковой лепесток запрещает способность массива обнаружить более слабый сигнал в присутствии большего соседнего сигнала. При помощи сужения массивов можно уменьшать лепестки стороны.
Используйте опцию Taper, чтобы задать заострение массивов как окно Taylor с набором Sidelobe Attenuation к дБ 30. Следующие данные показывают, как окно Тейлора уменьшает все лепестки стороны до-30 дБ — но за счет расширения mainlobe.
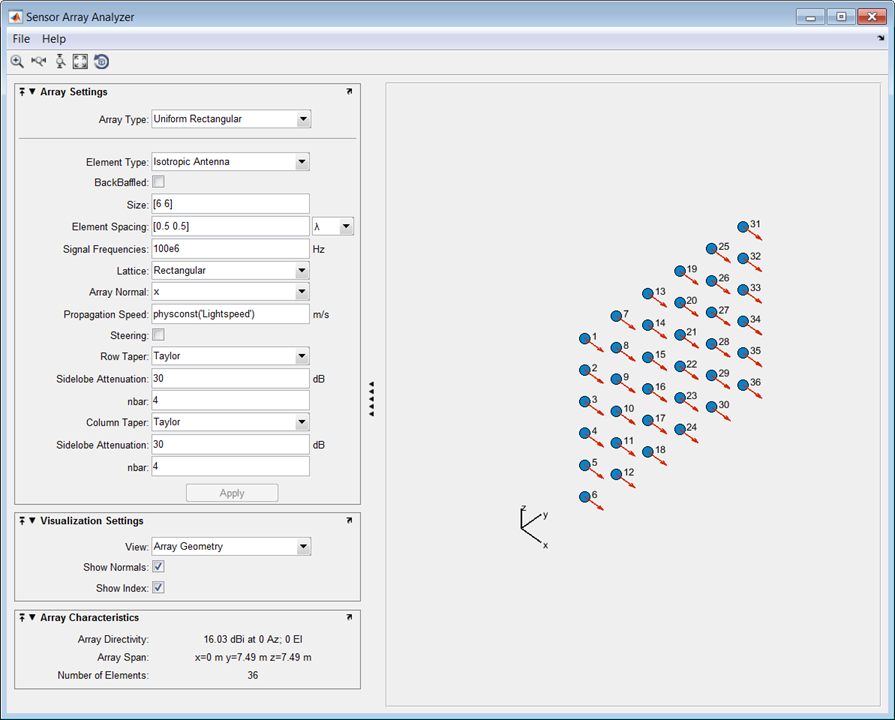
Этот пример показывает, как создать 6 6 универсальный прямоугольный массив (URA), разработанный, чтобы обнаружить и локализовать сигнал на 100 МГц.
Установите Array Type на Uniform Rectangular, Element Type к Isotropic Antenna и Size к [6 6].
Разработайте массив, чтобы найти направление прибытия сигнала на 100 МГц установкой Signal Frequencies к 100e+6 и строке и столбцу Element Spacing к 0,5 длинам волны.
Установите и Row Taper и Column Taper к окну Taylor.
Форму массива показывают в фигуре ниже.
Наконец, отобразите направленность трехмерного массива путем установки опции View на 3D Array Directivity, как показано в следующей фигуре:
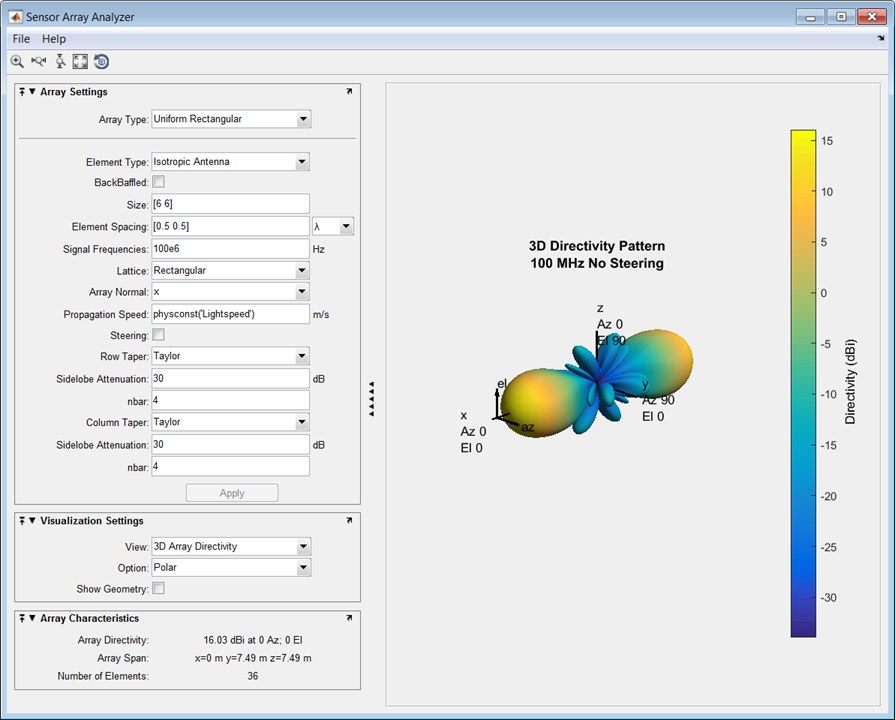
Значительный критерий производительности для любого массива является своей направленностью массивов. Можно использовать приложение, чтобы исследовать эффекты сужения на направленности массивов. Без сужения направленность массивов для этого URA составляет 17,2 дБ. С сужением направленность массивов теряет 1 дБ, чтобы привести к 16,0 дБ.
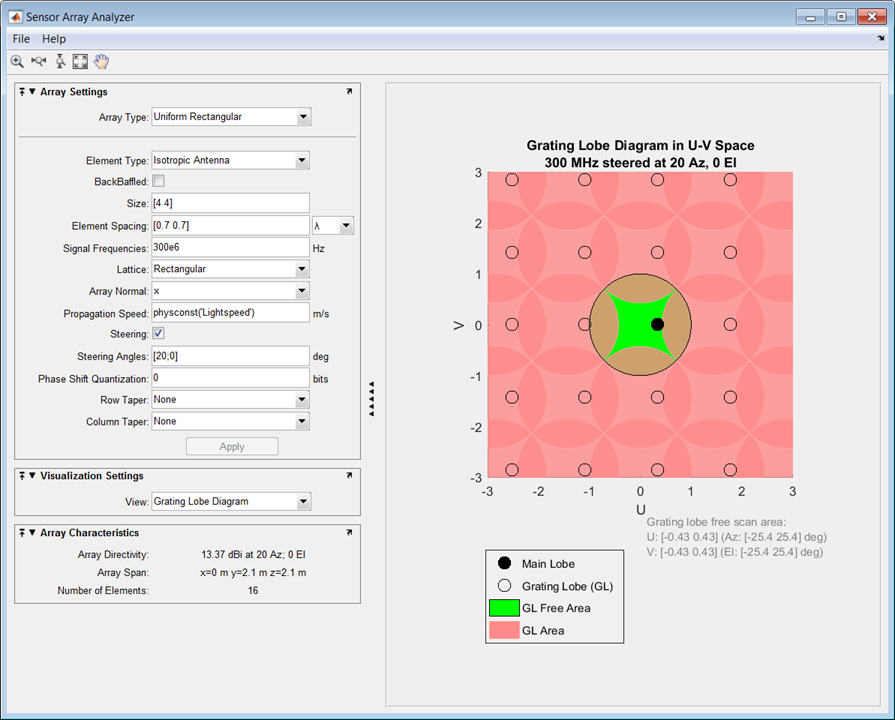
Этот пример показывает скрипучую схему лепестка универсального прямоугольного массива (URA) 4 на 4, разработанного, чтобы обнаружить и локализовать сигнал на 300 МГц.
Установите Array Type на Uniform Rectangular, Element Type к Isotropic Antenna и массив Size к [4 4].
Установите Signal Frequencies на 300e+6.
Путем установки строки и столбца Element Spacing на 0,7 длины волн вы создаете пространственно субдискретизируемый массив.
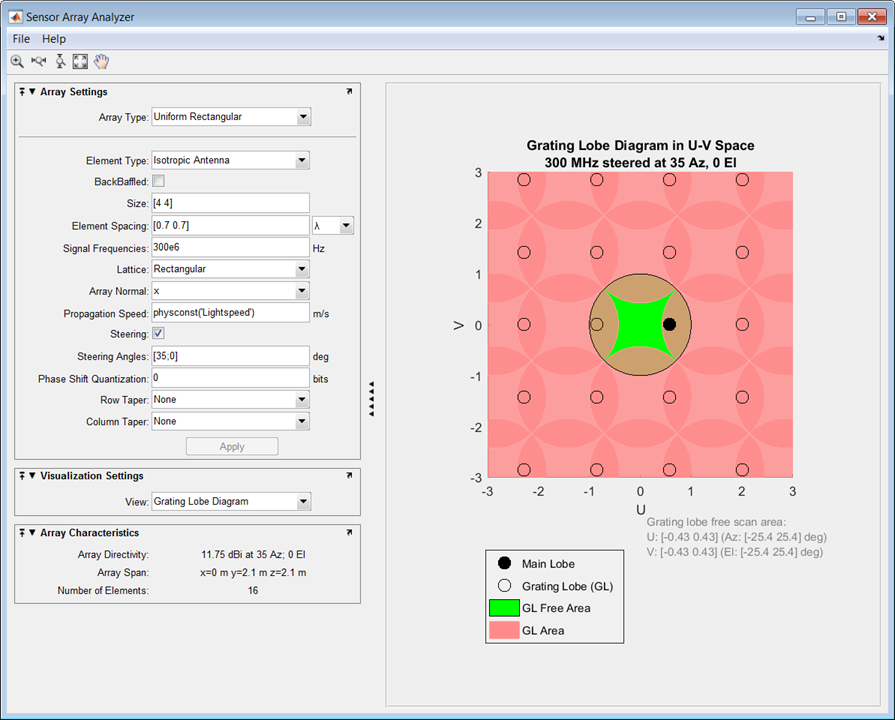
Эти данные показывают скрипучую схему лепестка, произведенную когда вы beamform массив к углу [20,0]. mainlobe определяется маленьким черным заполненным кругом. Несколько скрипучих лепестков определяются маленькими незаполненными черными кругами. Больший черный круг называется физической областью, для который u2+ v2 ≤ 1. mainlobe всегда находится в физической области. Скрипучие лепестки могут или не могут лечь в физической области. Любой скрипучий лепесток в физической области приводит к неоднозначности в направлении входящей волны. Зеленая область показывает, где mainlobe может быть указан без любых скрипучих лепестков, появляющихся в физической области. Если mainlobe собирается указать за пределами зеленой области, скрипучий лепесток перемещается в физическую область.
Следующие данные показывают то, что происходит, когда указывающее направление находится за пределами зеленой области. В этом случае один скрипучий лепесток перемещается в физическую область.
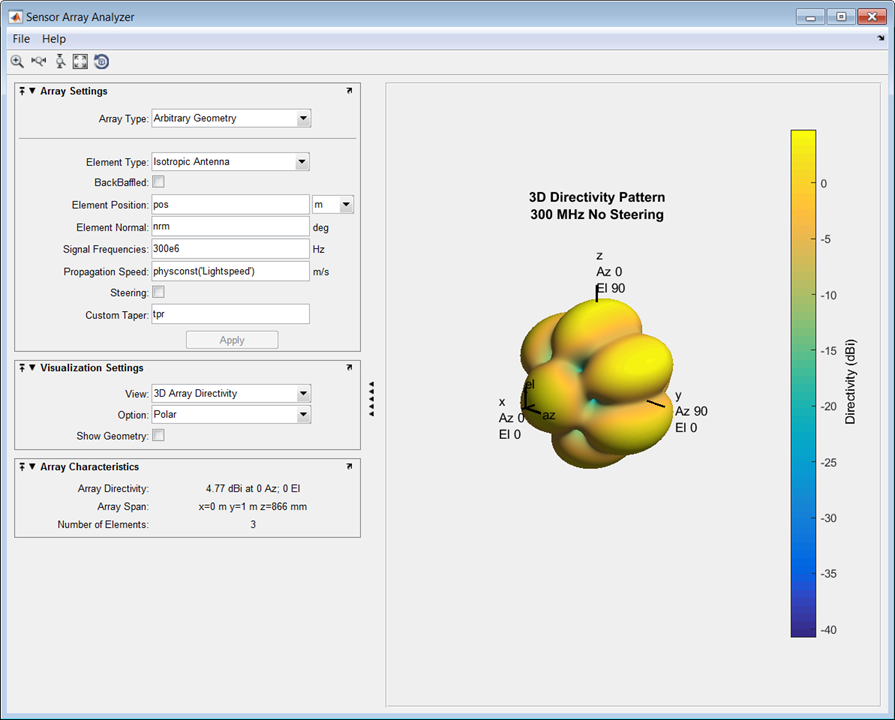
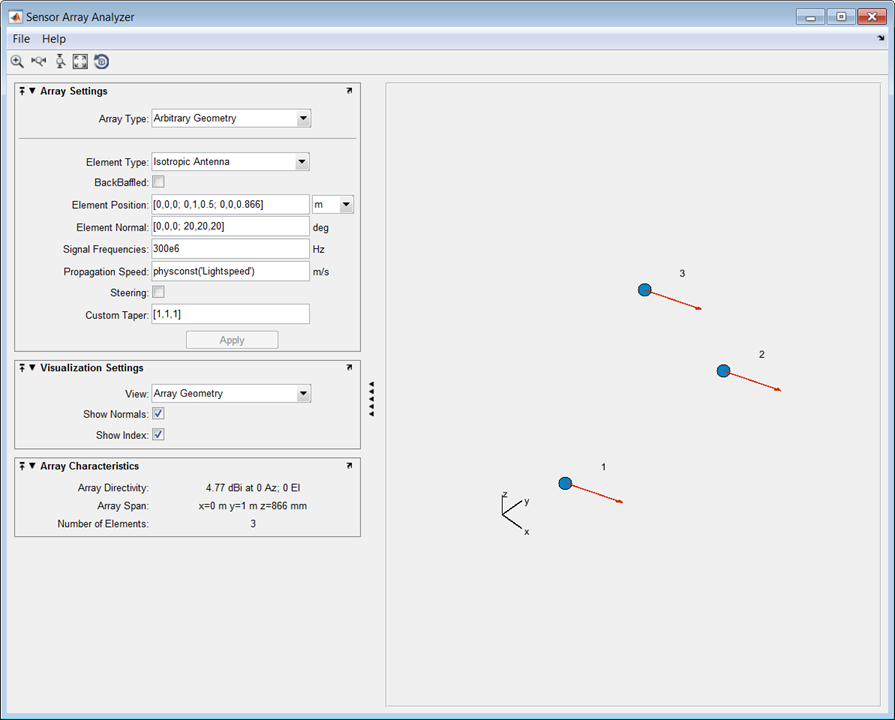
Этот пример показывает, как создать треугольный массив трех изотропных элементов антенны.
Можно задать массив, который имеет произвольное размещение датчиков. В этом примере элементы помещаются в [0,0,0]', [0,1,0.5]' и [0,0,0.866]'. Все элементы имеют то же нормальное направление [0,20], указывая на 0 ° в азимуте и 20 ° в повышении.
Постройте направленность трехмерного массива в полярных координатах.
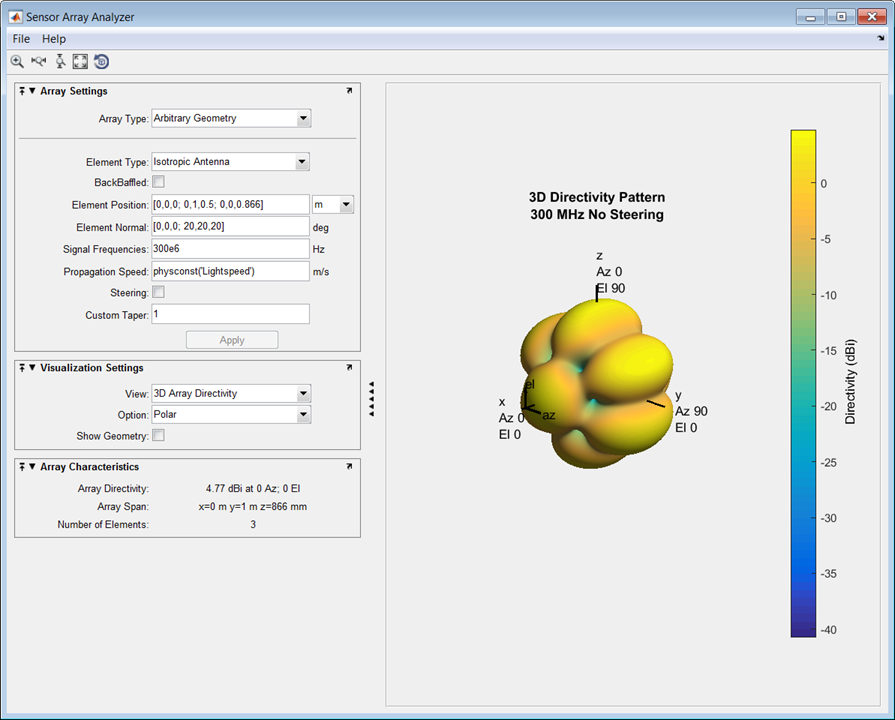
Этот пример показывает, как задать массив, который имеет произвольное размещение датчиков, но в этом случае, создайте переменные MATLAB или массивы в командной строке и используйте их в соответствующих полях sensorArrayAnalyzer
В командной строке MATLAB создайте массив положения элемента, pos, элемент нормальный массив, nrm, и массив значения заострения, tpr.
pos = [0,0,0;0,1,0.5;0,0,0.866]; nrm = [0,0,0;20,20,20]; tpr = [1,1,1];
Введите эти переменные в соответствующие поля sensorArrayAnalyzer.