Преобразуйте входной сигнал Simulink в физический сигнал
Утилиты
Блок Simulink-PS Converter преобразовывает вход сигнал Simulink® в физический сигнал. Используйте этот блок, чтобы соединить источники Simulink или другие блоки Simulink к входным параметрам схемы Физической сети.
Чтобы передать преобразование сигнала при занимании минимального места холста, значок блока изменяется динамически на основе того, соединяется ли это с другими блоками.
| Когда блок... | Блокируйте значок |
|---|---|
Несвязанный |
|
Соединенный с другими блоками |
|
Вы задаете желаемый модуль как параметр Input signal unit. Значение параметров управляет модулем физического сигнала в выходном порту блока, который служит входным сигналом для физической сети Simscape™.
Можно также задать физическую единицу измерения на Сигнале Simulink, соединенном с входным портом блока. В этом случае программное обеспечение проверяет, что эти два модуля соответствуют (для получения дополнительной информации, смотрите Работу с Модулями Simulink). Модули Сигнала Simulink не распространяют в физическую сеть.
Если вы оставляете блок безразмерным с набором параметра Input signal unit к 1, то модуль физического сигнала выведен из целевого блока. Целевые модули блока по умолчанию являются "килограммом метра, вторым" или MKS (SI). Если вы задаете различные модули, соразмерные с ожидаемыми модулями по умолчанию целевого входа блока, то директор производства присоединяет эти модули к входному значению Сигнала Simulink и выполняет необходимое модульное преобразование при обеспечении сигнала целевому блоку.
В схеме ниже, Идеальный Исходный блок Крутящего момента ожидает сигнал крутящего момента, в N*m, на его порте S. Постоянный исходный блок обеспечивает значение для этого входного сигнала. Если бы вы оставили блок Simulink-PS Converter безразмерным, Идеальный Исходный блок Крутящего момента сгенерировал бы крутящий момент 1 000 N*m. Параметры других блоков в этом примере выбраны так, чтобы выходное значение блока Ideal Torque Sensor было равно крутящему моменту, сгенерированному Идеальным Исходным блоком Крутящего момента, и поэтому блок Display показал бы значение 1 000. Если вы изменяете значение параметров Input signal unit в блоке Simulink-PS Converter к N*cm, директор производства выполняет преобразование, и Идеальный Исходный блок Крутящего момента генерирует крутящий момент 10 N*m; значение крутящего момента в блоке Display изменяется на 10, как показано в схеме.

Когда входной сигнал связан с термодинамическими переменными и содержит единицы температуры, необходимо решить, должно ли аффинное преобразование быть применено. Для получения дополнительной информации смотрите, Когда Применить Аффинное Преобразование. Обычно, если входной сигнал представляет относительную температуру, то есть, изменение в температуре, необходимо применить линейное преобразование, ΔTnew = L * ΔTold (метод по умолчанию). Однако, если входной сигнал представляет абсолютную температуру, необходимо применить аффинное преобразование, Tnew = L * Told + O.
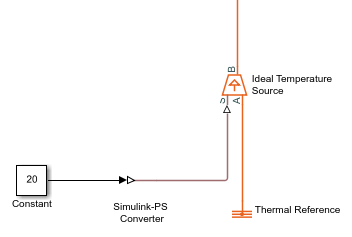
Например, в блоке Simulink-PS Converter, показанном в следующей схеме, если вы вводите degC в поле Input signal unit и устанавливаете флажок Apply affine conversion, температура, сгенерированная Идеальным Температурным Исходным блоком, равна 293.15 K. Однако, если вы оставляете флажок Apply affine conversion ясным, вывод Идеального Температурного Исходного блока является 20 K.
Невведенные входные параметры не поддерживают аффинные модули. Если вы задаете аффинные модули в блоке Simulink-PS Converter и затем соединяете его непосредственно с невведенным входным портом, значение сигналов преобразовано в соответствующую основную единицу, и дальнейшие математические операции выполняются с тем значением.
Модули, которые будут присвоены физическому сигналу. Эти модули должны быть соразмерными с ожидаемыми модулями по умолчанию целевого входа блока. Можно выбрать модуль из выпадающего списка или ввести желаемое модульное имя, такое как rpm или допустимое выражение, такое как rad/s. Для получения дополнительной информации и список модульных сокращений, смотрите, Как Задать Модули в Диалоговых окнах Блока и Модульных Определениях. Значением по умолчанию является 1, что означает что модули физического сигнала в блоке выходное соответствие ожидаемые модули по умолчанию целевого входа блока.
Этот флажок применим только для единиц, которые могут быть преобразованы или с или без аффинного смещения, такого как тепловые модули. Для получения дополнительной информации смотрите Тепловые Модульные Преобразования.
Этот параметр позволяет вам решить, отфильтровать ли вход и таким образом обеспечить производные времени входного сигнала или обеспечивает производные времени через дополнительные входные порты на блоке Simulink-PS Converter:
Provide signals — Выберите, хотите ли вы обеспечить только входной сигнал, или также обеспечить производные времени входного сигнала как дополнительные входные сигналы, при помощи параметра Provided signals. Входными опциями обработки по умолчанию является Provide signals и Input only. Если вы используете явный решатель, MathWorks рекомендует, чтобы вы обеспечили входные производные путем выбора одной из других опций. Для получения дополнительной информации смотрите Входные сигналы Фильтрации и Обеспечение Производных Времени.
Filter input, derivatives calculated — Пропустите вход через фильтр нижних частот, который также обеспечивает входные производные. В этом случае входной сигнал изменяется (посредством фильтрации) прежде чем быть преобразованным в физический сигнал. Фильтр первого порядка обеспечивает одну производную, в то время как фильтр второго порядка обеспечивает первые и вторые производные. Если вы используете эту опцию, устанавливаете соответствующее значение параметров Input filtering time constant, как описано ниже.
Zero derivatives (piecewise constant) — Если ваш входной сигнал является кусочной константой (такой как шаг), эта опция позволяет вам явным образом обнулить входные производные.
Этот параметр применим, только если параметр Filtering and derivatives устанавливается на Provide signals. Это позволяет вам обеспечить производные времени входного сигнала как дополнительные входные сигналы:
Input only — Обеспечьте только входной сигнал. Это значение по умолчанию. Если вы выбираете эту опцию, блок имеет один входной порт Simulink и один выходной порт физического сигнала.
Input and first derivative — Если вы выбираете эту опцию, дополнительный входной порт Simulink, кажется, на блоке Simulink-PS Converter, позволяет вам соединить входную производную обеспечения сигнала.
Input and first two derivatives — Если вы выбираете эту опцию, два дополнительных входных порта Simulink, кажется, на блоке Simulink-PS Converter, позволяют вам соединить сигналы, обеспечивающие входные производные.
Этот параметр применим, только если параметр Filtering and derivatives устанавливается на Filter input, derivatives calculated. Это позволяет вам задать количество производных времени, вычисленных для входного сигнала путем выбора порядка фильтра:
First-order filtering — Обеспечивает только первую производную.
Second-order filtering — Обеспечивает первые и вторые производные.
Этот параметр применим, только если параметр Filtering and derivatives устанавливается на Filter input, derivatives calculated. Это задает временную константу фильтра, которая управляет фильтрацией входного сигнала. Отфильтрованный вход следует за истинным входом, но сглаживается с задержкой на порядке выбранной временной константы. Необходимо установить временную константу на значение, не больше, чем самый маленький временной интервал интереса к системе. Компромисс в выборе очень небольшой временной константы - то, что отфильтрованный входной сигнал будет ближе к истинному входному сигналу, за счет увеличения жесткости системы и замедления симуляция. Значением по умолчанию является .001 s.
Блок имеет один, два, или три входных порта Simulink (в зависимости от значения параметров Provided signals), расположенный на его левой стороне и выходном порте физического сигнала, расположенном на его правой стороне (в ориентации значения по умолчанию блока).
