Определите частоту и основной компонент трехфазного угла фазы сигнала
Simscape / Электрический / Специализированные Энергосистемы / Control & Measurements / PLL
Блок PLL (3ph) моделирует Цикл блокировки фазы (PLL) система управления с обратной связью, которая отслеживает частоту и фазу синусоидального трехфазного сигнала при помощи внутреннего осциллятора частоты. Система управления настраивает внутреннюю частоту осциллятора, чтобы сохранить различие в фазах для 0.
Данные показывают внутреннюю схему PLL.
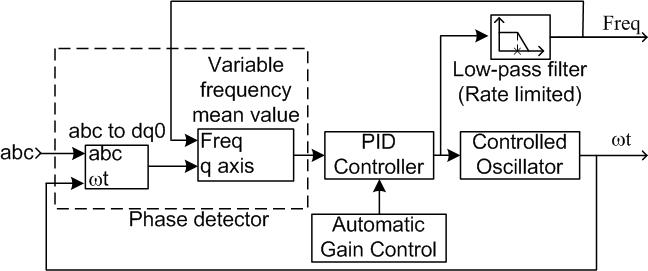
Трехфазный входной сигнал преобразован в кадр вращения dq0 (Парк преобразовывают), использование угловой скорости внутреннего осциллятора. Квадратурная ось сигнала, пропорционального разности фаз между сигналом abc и внутренним кадром вращения осциллятора, отфильтрована с блоком Mean (Variable Frequency). Контроллер Пропорциональной Интегральной Производной (PID), с дополнительным автоматическим управлением усилением (AGC), сохраняет разность фаз для 0 путем действия на управляемый осциллятор. PID вывод, соответствуя угловой скорости, отфильтрован и преобразован в частоту в герц, который используется средним значением.
Задайте минимальную ожидаемую частоту входного сигнала. Этот параметр устанавливает buffer size блока Mean (Variable Frequency), используемого в блоке вычислять среднее значение. Значением по умолчанию является 45.
Задайте начальную фазу и частоту входного сигнала. Значением по умолчанию является [0, 60].
Задайте пропорциональное, интеграл и производные усиления внутреннего ПИД-регулятора. Используйте усиления, чтобы настроить время отклика PLL, перерегулирование и установившуюся ошибочную производительность. Значением по умолчанию является [180, 3200, 1].
Задайте временную константу для фильтра первого порядка блока производной ПИДа. Значением по умолчанию является 1e-4.
Задайте максимальный положительный и отрицательный наклон частоты сигнала. Значением по умолчанию является 12.
Укажите, что lowpass второго порядка фильтруют частоту среза. Значением по умолчанию является 25.
Задайте шаг расчета блока в секундах. Установите на 0, чтобы реализовать непрерывный блок. Значением по умолчанию является 0.
Когда этот флажок устанавливается, блок PLL оптимизирует свою производительность путем масштабирования сигнала регулятора ПИДа согласно значению входного сигнала. Выберите эту опцию, когда входной сигнал не будет нормирован. Значение по умолчанию выбрано.
abcНормированные трехфазные сигналы, в pu.
FreqИзмеренная частота, в герц.
wtУгол (рад), отличающийся между 0 и 2*pi, синхронизировался на нулевых пересечениях основного принципа (положительная последовательность) фазы A.
| 'SampleTime' | Заданный в параметре Sample Time. Непрерывный, когда Sample Time = 0. |
| Скалярное расширение | Нет |
| Определенный размерность | Нет |
| Обнаружение пересечения нулем | Да |
Пример power_PLL показывает использование PLL (3ph) и блоки PLL.
Блок PLL питается синусоидальным сигналом 60 Гц, увеличиваясь до 61 Гц с 0,5 с до 1,5 с. Заметьте, что частота достигает новой частоты в короткое время отклика.
Блок PLL (3ph) питается трехфазными синусоидальными сигналами, увеличивающимися от 60 Гц до 61 Гц между 0,5 и 1,5 секундами. PLL (3ph) частота достигает новой частоты быстрее, чем PLL из-за дополнительной информации о фазе.
Образцовый шаг расчета параметризован с переменной Ts (со значением по умолчанию 0). Чтобы дискретизировать блок PLL, в командной строке MATLAB®, входят
Ts = 50e-6
