Образцовая динамика одной фазы асинхронная машина с ротором клетки белки
Simscape / Электрический / Специализированные Энергосистемы / Основные Блоки / Машины
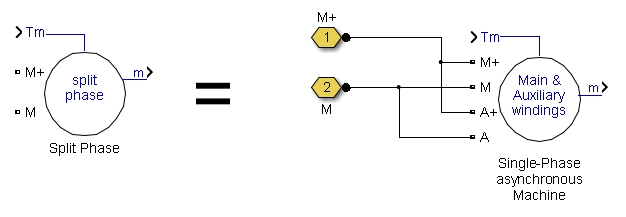
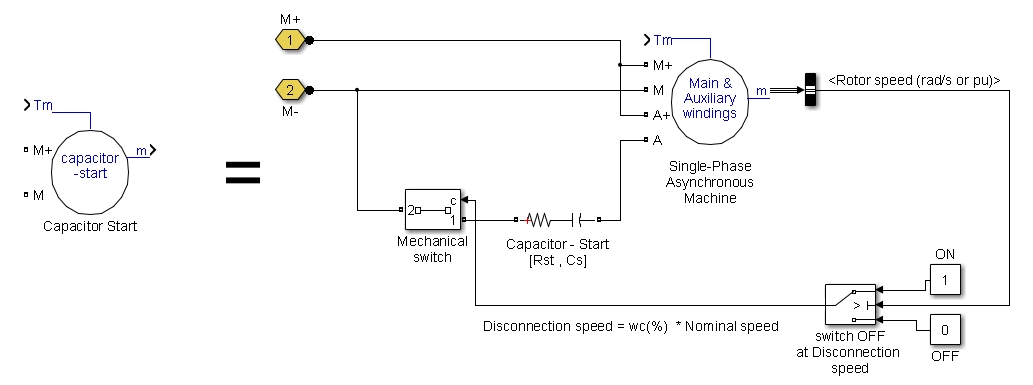
Эта машина имеет две обмотки: основной и вспомогательный. С моделью можно моделировать расщепленную фазу, запуск конденсатор, конденсаторный конденсатор запуска управляемые, и основные & вспомогательные режимы работы обмоток.
Для режима расщепленной фазы основные и вспомогательные обмотки внутренне соединяются можно следующим образом:
Для режима запуска конденсатор основные и вспомогательные обмотки внутренне соединяются можно следующим образом:
Для конденсаторного конденсатора запуска управляемый режим основные и вспомогательные обмотки внутренне соединяются можно следующим образом:

Электрическая часть машины представлена моделью в пространстве состояний четвертого порядка и механической деталью системой второго порядка. Все электрические переменные и параметры отнесены в статор, обозначенный следующими главными знаками в уравнениях машины. Весь статор и количества ротора находятся в кадре ссылки статора (dq кадр). Индексы заданы в следующей таблице.
Индекс | Определение |
|---|---|
d | d количество оси |
q | q количество оси |
r | Упомянутый основное извилистое количество ротора |
R | Упомянутый вспомогательное извилистое количество ротора |
s | Основное извилистое количество статора |
S | Вспомогательное извилистое количество статора |
l | Индуктивность утечки |
m | Намагничивание индуктивности |
| V qs = R siqs + d φ qs/dt | φ qs = L ssiqs + L msi'qr | |
| V ds = R Sids + d φ ds/dt | φ ds = L SSids + L mSi'dr | |
| V' qr = R' ri'qr + d φ' qr/dt – (N s/NS) ω rφ'dr | φ' qr = L' ri'qr + L msiqs | |
| V' доктор = R' Ri'dr + d φ' dr/dt + (N S/Ns) ω rφ'qr | где | φ' доктор = L' RRi'dr + L mSids |
| T e = p [(N S/Ns) φ' qri'dr – (N s/NS) φ' dri'qr] | L ss = L ls + мс L | |
| L SS = L lS + мс L | ||
| RR L' = L' lr + мс L | ||
| RR L' = L' lR + мс L |
Ссылочный кадр
Ссылочный кадр, зафиксированный в статоре, преобразовывает напряжения и токи к кадру dq.
Следующие отношения описывают преобразования кадра ab-to-dq, применился к одной фазе асинхронная машина.
Переменная f может представлять или напряжение, токи или потокосцепление.
Асинхронные параметры блоков машины одной фазы заданы можно следующим образом (все количества отнесены в статор).
Параметр | Определение |
|---|---|
RS, Lls | Основное извилистое сопротивление статора и индуктивность утечки |
RS, LlS | Вспомогательное извилистое сопротивление статора и индуктивность утечки |
R′r, L′lr | Основное извилистое сопротивление ротора и индуктивность утечки |
R′R, L′lR | Вспомогательное извилистое сопротивление ротора и индуктивность утечки. Эти два значения равны основному извилистому сопротивлению ротора и значениям индуктивности утечки, соответственно. |
Lms | Основная индуктивность намагничивания обмотки |
LmS | Вспомогательная индуктивность намагничивания обмотки |
Lss, L′rr | Общий основной извилистый статор и индуктивность ротора |
LSS, L′RR | Общий вспомогательный извилистый статор и индуктивность ротора |
Сосуд, МСФО Vbs, ibs Vqs, IQ | Основное извилистое напряжение статора и текущий Вспомогательное извилистое напряжение статора и текущий q напряжение статора оси и текущий |
V′qr, i′qr | q напряжение ротора оси и текущий |
Vds, идентификаторы | d напряжение статора оси и текущий |
V′dr, i′dr | d напряжение ротора оси и текущий |
ϕqs, ϕds | Статор q и d потоки оси |
ϕ ′ qr, ϕ ′ доктор | Ротор q и d потоки оси |
ωm | Угловая скорость ротора |
Θm | Угловое положение ротора |
p | Количество пар полюса |
ωr | Электрическая угловая скорость (ωm x p) |
Θr | Электрическое угловое положение ротора (Θm x p) |
Te | Электромагнитный крутящий момент |
TM | Крутящий момент механического устройства вала |
J F | Объединенный ротор и коэффициент инерции загрузки в (kg.m2). Установите на большое количество, чтобы моделировать заблокированный ротор. Объединенный ротор и загружает вязкий коэффициент трения. |
H | Объединенный ротор и инерция загрузки, постоянная в (s). Установите на большое количество, чтобы моделировать заблокированный ротор. |
Не уточнено NS Rst Cs Rrun Crun | Количество эффективных очередей основной обмотки. Количество эффективных очередей вспомогательной обмотки. Запустите конденсатор сопротивление Запустить конденсатор Управляемое конденсатором сопротивление Управляемый конденсатором |
N | Отношение количества эффективных очередей вспомогательной обмотки и количества эффективных очередей основной обмотки. |
Можно принять решение между двумя типами модулей задать электрические и механические параметры модели, на модульное диалоговое окно и диалоговое окно SI. Оба блока моделируют ту же машину. В зависимости от диалогового окна, которое вы используете, Simscape™ Electrical™, Специализированные Энергосистемы автоматически преобразовывают параметры, в которые вы задаете на модульные параметры. Модель Simulink® блока Single Phase Asynchronous Machine использует на модульные параметры.
Выбор крутящий момент применился к валу как к входу Simulink блока, или представлять вал машины Simscape вращательный механический порт.
Выберите Torque Tm (значение по умолчанию), чтобы задать вход крутящего момента в N.m или в pu и маркировке изменения входа блока к TM. Скорость машины определяется Инерцией машины J (или инерцией постоянный H для pu машины) и различием между прикладной механической TM крутящего момента и внутренним электромагнитным крутящим моментом Те. Соглашение знака для механического крутящего момента состоит в том, когда скорость положительна, положительный сигнал крутящего момента указывает на моторный режим, и отрицательный сигнал указывает на режим генератора.
Выберите Mechanical rotational port, чтобы добавить в блок механическое устройство Simscape вращательный порт, который позволяет связь вала машины с другими блоками Simscape, которые имеют механические вращательные порты. Вход Simulink, представляющий механическую TM крутящего момента машины, затем удален из блока.
Следующая фигура указывает, как соединить Идеальный Исходный блок Крутящего момента с библиотеки Simscape на вал машины, чтобы представлять машину в моторном режиме, или в режиме генератора, когда скорость ротора положительна.
Задайте на модульное диалоговое окно или диалоговое окно SI. Значением по умолчанию является SI.
Задайте один из четырех типов одной фазы асинхронные машины: Split Phase (значение по умолчанию), Capacitor-Start, Capacitor-Start-Run или Main & auxiliary windings.
Когда этот флажок устанавливается, измерение, вывод использует имена сигнала, чтобы идентифицировать метки шины. Выберите эту опцию для приложений, которые требуют, чтобы метки сигнала шины имели только алфавитно-цифровые символы.
Когда этот флажок снимается (значение по умолчанию), измерение, вывод использует определение сигнала, чтобы идентифицировать метки шины. Метки содержат неалфавитно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink.
Номинальная полная мощность Pn (ВА), RMS Vn (V) и частота fn (Гц). Значением по умолчанию является [ .25*746 110 60].
RS сопротивления статора (Ω или pu) и индуктивность утечки Lls (H или pu). Значением по умолчанию является [2.02 7.4e-3] (SI) и [0.031135 0.042999] (pu).
RR сопротивления ротора' (Ω или pu) и индуктивность утечки Llr' (H или pu), оба упомянули статор. Значением по умолчанию является [4.12 5.6e-3] (SI) и [0.063502 0.03254] (pu).
Индуктивность намагничивания Lms (H или pu). Значением по умолчанию является 0.1772 (SI) и 1.0296 (pu).
Сопротивление статора RS (Ω или pu) и индуктивность утечки LlS (H или pu). Обратите внимание на то, что Вспомогательные извилистые параметры ротора приняты, чтобы быть равными основному извилистому сопротивлению ротора и значениям индуктивности утечки. Поэтому это не требуется, чтобы задавать их в диалоговом окне. Значением по умолчанию является [7.14 8.5e-3] (SI) и [0.11005 0.049391] (pu).
Для диалогового окна единиц СИ: объединенная машина и коэффициент инерции загрузки J (kg.m2), объединенный вязкий коэффициент трения F (N.m.s), количество пар полюса p и отношения количества эффективных очередей вспомогательной обмотки и количества эффективных очередей основной обмотки. модульное диалоговое окно pu: инерция постоянный H (s), объединенный вязкий коэффициент трения F (pu) и количество пар полюса p. Значением по умолчанию является [0.0146 0 2 1.18] (SI) и [1.3907 0 2 1.18] (pu).
Емкость запуска Cs (фарада или pu) и конденсаторное серийное сопротивление Rst (Ω или pu). Значением по умолчанию является [2 254.7e-6] (SI) и [0.030826 6.2297] (pu).
Емкость выполнения Crun (фарада или pu) и серийное сопротивление Rrun (фарада или pu). Значением по умолчанию является [18 21.1e-6] (SI) и [0.27744 0.51608] (pu).
Задает скорость (%), когда вспомогательная обмотка может быть отключена. Значением по умолчанию является 75.
Задает начальную скорость (%). Значением по умолчанию является 0.
Задает шаг расчета, используемый блоком. Чтобы наследовать шаг расчета, заданный в блоке Powergui, установите этот параметр на −1 (значение по умолчанию).
TmВход Simulink блока является механическим крутящим моментом в вале машины. Когда вы используете маску параметров SI, вход является сигналом в N.m; в противном случае это находится в pu.
mSimulink вывод блока является вектором, содержащим сигналы измерения. Можно демультиплексировать эти сигналы при помощи блока Селектора Шины, обеспеченного в Библиотеке Simulink. В зависимости от типа маски вы используете, модули находятся в SI, или в pu.
Имя | Определение | Модули |
|---|---|---|
iar | Ротор текущий ir_a | A или pu |
ibr | Ротор текущий ir_b | A или pu |
iqr | Ротор текущий IQ | A или pu |
idr | Ротор текущий ID | A или pu |
phiqr | Поток ротора phir_q | V.s или pu |
phidr | Поток ротора phir_d | V.s или pu |
МСФО | Основной извилистый статор текущий ia | A или pu |
ibs | Вспомогательный извилистый статор текущий ib | A или pu |
phiqs | Поток статора phis_q (V.s) | V.s или pu |
phids | Поток статора phis_d (V.s) | V.s или pu |
vc | Конденсатор напряжения Vc | V или pu |
w | Скорость ротора | rad/s |
Te | Электромагнитный крутящий момент Те | N.m или pu |
тета | Угол ротора thetam | рад |
Блок Single Phase Asynchronous Machine не включает представление железных потерь и насыщения.
Пример power_singlephaseASM показывает использование блока Single Phase Asynchronous Machine в двух режимах работы.
[1] Краузе, P.C., О. Уосинкзук, и С.Д. Садхофф, анализ электрического машинного оборудования, нажатия IEEE, 1995.
