Реализуйте однофазный диск асинхронного двигателя
Simscape / Электрический / Специализированные Энергосистемы / Электроприводы / Диски AC
Блок Single-Phase Induction Motor Drive моделирует управляемый вектором однофазный диск машины. Конфигурация дисков состоит из выпрямителя полумоста, разделенной шины DC с двумя конденсаторами фильтра и инвертором 2D участка, который предоставляет обмотки для электродвигателя.
Однофазная машина индукции (SPIM), без ее запуска и рабочих конденсаторов, обработана как асимметричная двухфазная машина. Вспомогательные и основные обмотки доступны и находятся в квадратуре. Эта настройка обеспечивает хорошую производительность и операцию в регенерации режима.

Однофазный асинхронный двигатель асимметричен из-за неравных сопротивлений и индуктивности основных и вспомогательных обмоток. Чтобы получить математическую модель двигателя с постоянными параметрами (напряжение, текущее, и поток), необходимо преобразовать все переменные к стационарному ссылочному кадру (d-q) зафиксированный к статору.
Математическая модель
Эта схема показывает математическую модель машины.
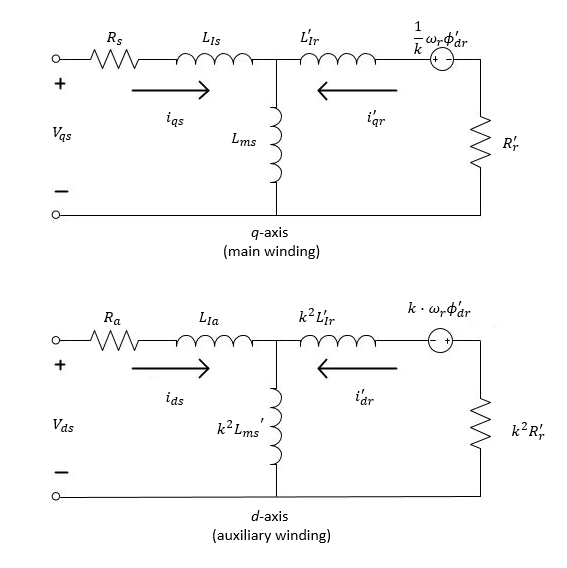
Na и Nm представляют количество вспомогательных и основных обмоток статора, соответственно.
Уравнения, которые задают напряжение для модели (в стационарном ссылочном кадре d-q):
и
где:
Vqs является q - напряжение статора оси.
Rs является основным сопротивлением статора.
iqs является q - текущий статор оси.
ϕqs является q - потокосцепление статора оси.
Vds является d - напряжение статора оси.
Ra является вспомогательным сопротивлением статора.
ids является d - текущий статор оси.
ϕds является d - потокосцепление статора оси.
R'r является сопротивлением обмотки ротора, упомянул основную обмотку статора.
i'qr является q - текущий ротор оси упомянул основную обмотку статора.
ϕ'qr является q - потокосцепление ротора оси упомянуло основную обмотку статора.
k является отношением поворота Na к Nm.
ωr является ротором электрическая угловая скорость.
i'dr является d - текущий ротор оси упомянул основную обмотку статора.
ϕ'dr является d - потокосцепление ротора оси упомянуло основную обмотку статора.
Na является количеством вспомогательных обмоток статора.
Nm является количеством основных обмоток статора.
Уравнения, которые задают поток для модели (в стационарном ссылочном кадре d-q):
где:
Lls является индуктивностью утечки основной обмотки статора.
Lla является индуктивностью утечки вспомогательной обмотки статора.
Lms является индуктивностью намагничивания основной обмотки статора.
L'lr является индуктивностью утечки обмотки ротора, упомянул основную обмотку статора.
Электромагнитный крутящий момент, выраженный как функция потокосцеплений ротора и токов,
где:
Te является электромагнитным крутящим моментом.
P является количеством пар полюса.
Используя токи статора и потокосцепления ротора как переменные пространства состояний для модели SPIM, электромагнитное уравнение крутящего момента
Используя следующую замену переменной,
и
Поэтому электромагнитное уравнение крутящего момента может быть переписано как
В косвенном роторе, ориентированном на поток на управление, d - ось ссылочного кадра ориентирована вдоль вектора потокосцепления ротора на ϕ'r, затем
и
Электромагнитный крутящий момент приводит к
Отсюда, q - ось текущий компонент
Получившаяся скорость промаха, ωs,
Отсюда, d - ось текущий компонент
где верхний индекс e указывает, что переменная отнесена в синхронный ссылочный кадр.
Эта блок-схема показывает ориентированное на поле управление.

Этот тип управления выбирает вектор напряжения из переключающейся таблицы, чтобы управлять выключателями питания в инверторе, чтобы получить необходимый поток статора и соответствующий моторный крутящий момент. От моторных уравнений в стационарном ссылочном кадре d-q, оцените поток статора и крутящий момент:
и
Принятие приближения
и с помощью переменных статора (потокосцепления и токи) как переменные пространства состояний модели SPIM, электромагнитным крутящим моментом дают
Используя векторное произведение, крутящий момент
это
где:
|ϕs | и |ϕr | являются значениями статора и векторов пробела потокосцепления ротора, соответственно.
δ является углом между векторами пробела.
Изменение в относительном перемещении ϕs и ϕr (заданный углом, δ) влияет на моторный мгновенный крутящий момент. Если падение напряжения на сопротивлении статора не использовано, потокосцепление статора непосредственно зависит от выходного напряжения инвертора.
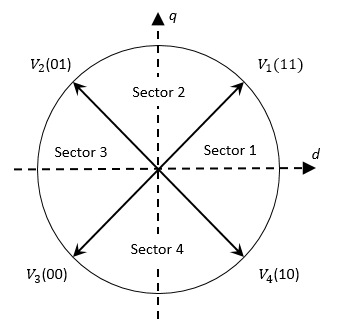
Следующая схема показывает доступные векторы напряжения, которые соответствуют возможным состояниям инвертора и четырем отличным секторам в d-q плоскость для инвертора 2D участка.
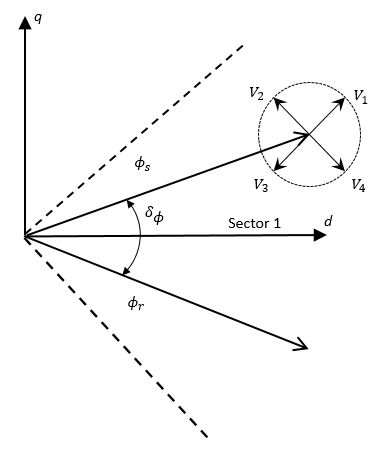
Выбор соответствующих векторов напряжения инвертора может непосредственно изменить значение ϕs (управление потоком) и вращающаяся скорость ϕs (управление крутящим моментом) как показано в этой схеме сектора 1.
Эта блок-схема показывает управление прямого крутящего момента.
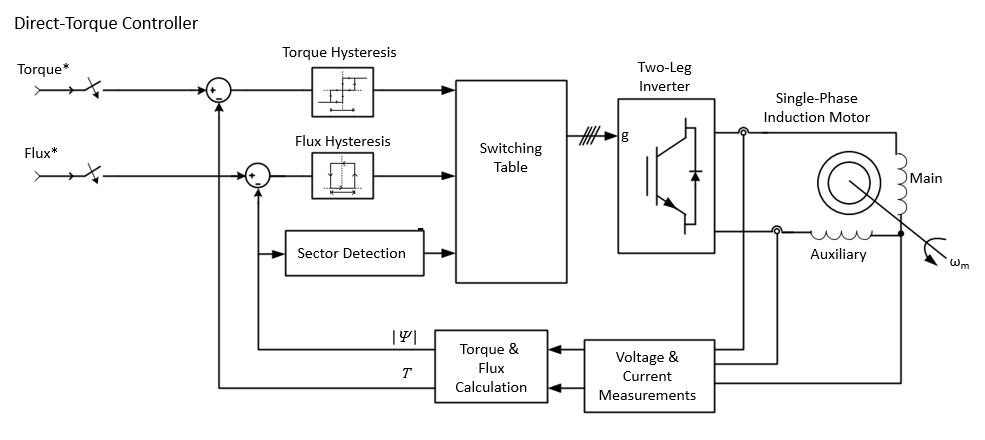
Предполагаемый поток и крутящий момент по сравнению со ссылками с помощью гистерезисного управления. digitalized выходные переменные и сектор положения потока статора используются, чтобы выбрать адаптированный вектор напряжения из переключающейся таблицы. Эта таблица показывает соответствующий вектор напряжения для инвертора, где Hϕ и HTe являются выводом потока и закручивают гистерезисные блоки
| Hϕ | HTe | Сектор 1 | Сектор 2 | Сектор 3 | Сектор 4 |
|---|---|---|---|---|---|
1 (Поток произошел), | 1 (Крутящий момент произошел), | V1 | V2 | V3 | V4 |
0 (Крутящий момент снижается), | V4 | V1 | V2 | V3 | |
0 (Поток снижается), | 1 (Крутящий момент произошел), | V2 | V3 | V4 | V1 |
0 (Крутящий момент снижается), | V3 | V4 | V1 | V2 |
Base sample time — 'SampleTime' 2e-06 (значение по умолчанию)Моторный шаг расчета.
Output bus mode — Вариант блокаMultiple outport buses (значение по умолчанию) | Single outport busesСконфигурируйте входы шины.
Выбор Multiple outport buses включает выходные порты Ctrl и Conv.
Use bus labels — Метки выходного сигналаОпция, чтобы маркировать сигналы шины.
Mechanical input — Вариант блокаTorque TM (значение по умолчанию) | Mechanical rotational portСконфигурируйте механические порты ввода и вывода. Если вы выбираете Torque TM, вывод является частотой вращения двигателя согласно этому дифференциальному уравнению, которое описывает механическую системную динамику:
где:
Te является электромагнитным крутящим моментом.
J является инерцией.
ωr является угловой скоростью ротора.
F является приложенной силой.
Tm является механическим крутящим моментом.
Если вы выбираете Mechanical rotational port, порт подключения, S действует как оба механический порт ввода и вывода. Это позволяет прямую связь со средой Simscape™. Механическая система двигателя также включена в диск и основана на том же дифференциальном уравнении.
Выбор Torque TM включает порты Tm и Wm. Выбор Mechanical rotational port включает порт S.
Electrical parameters> Nominal values
Power (VA) — Моторная степень0.25*746 (значение по умолчанию)Моторная номинальная электроэнергия.
Voltage (Vrms) — Моторное напряжение110 (значение по умолчанию)Моторное номинальное электрическое напряжение.
Frequency (Hz) — ЧастотаМоторная номинальная электрическая частота.
Electrical parameters> Equivalent circuit values
Чтобы видеть эквивалентную схему для несимметричного SPIM, нажмите Equivalent circuit.
Electrical parameters> Equivalent circuit values> Main winding stator
Resistance (ohm) — Сопротивление2.02 (значение по умолчанию)Сопротивление статора основная обмотка.
Leakage inductance (H) — Индуктивность утечки7.4e-3 (значение по умолчанию)Моторная основная извилистая индуктивность утечки эквивалентной схемы статора.
Mutual inductance (H) — Взаимная индуктивность0.1772 (значение по умолчанию)Взаимная индуктивность статора основная обмотка.
Electrical parameters> Equivalent circuit values> Auxiliary winding stator
Resistance (ohm) — Сопротивление7.14 (значение по умолчанию)Сопротивление статора вспомогательная обмотка.
Leakage inductance (H) — Индуктивность утечки8.5e-3 (значение по умолчанию)Индуктивность утечки статора вспомогательная обмотка.
Mutual inductance (H) — Взаимная индуктивность1.18 (значение по умолчанию)Взаимная индуктивность статора вспомогательная обмотка.
Electrical parameters> Equivalent circuit values> Auxiliary winding rotor
Resistance (ohm) — Сопротивление4.12 (значение по умолчанию)Сопротивление ротора основная обмотка.
Leakage inductance (H) — Индуктивность5.6e-3 (значение по умолчанию)Индуктивность утечки ротора основная обмотка.
Mechanical parameters
Inertia (kg.m^2) — Инерция0.0146 (значение по умолчанию)Моторная инерция.
Friction factor (N.m.s) — Трение0 (значение по умолчанию)Моторный фактор трения.
Pole pairs — Количество пар полюса2 (значение по умолчанию)Количество моторных пар полюса.
Initial speed w0 (%synchronous speed) — Начальная скорость0 (значение по умолчанию)Моторная Начальная скорость.
Rectifier> Snubbers
Resistance (ohm) — Сопротивление10e3 (значение по умолчанию)Сопротивление демпферов выпрямителя. Чтобы устранить демпферы из модели, задайте inf.
Capacitance (F) — Емкость20e-9 (значение по умолчанию)Емкость демпферов выпрямителя. Чтобы устранить демпферы из модели, задайте 0. Для резистивных демпферов задайте inf.
Rectifier> Diodes
On-state resistance (ohm) — Сопротивление1e-3 (значение по умолчанию)Внутреннее сопротивление выпрямительных диодов, когда они проводят.
Forward voltage (V) — Напряжение0.8 (значение по умолчанию)Напряжение через выпрямительные диоды, когда они проводят.
DC Bus
Capacitance (F) — Емкость39e-4 (значение по умолчанию)Емкость этих двух конденсаторов в шине DC
Braking Chopper
Resistance (ohm) — Сопротивление8 (значение по умолчанию)Тормозящее сопротивление прерывателя используется, чтобы избежать повышенного напряжения шины во время моторного замедления или когда крутящий момент загрузки ускоряет двигатель.
Chopper Frequency (Hz) — Частота4000 (значение по умолчанию)Торможение частоты прерывателя.
Activation voltage (V) — Напряжение310 (значение по умолчанию)Динамическое торможение активируется, когда напряжение на шине достигает значения напряжения активации.
Shutdown voltage (V) — Напряжение300 (значение по умолчанию)Динамическое торможение закрывается, когда напряжение на шине достигает значения завершения работы.
Inverter> Switches
On-state resistance (ohm) — Сопротивление1e-3 (значение по умолчанию)Внутреннее сопротивление инвертора IGBTs, когда они проводят.
Inverter> Switches> Forward voltages (V)
Main Device — Напряжение0 (значение по умолчанию)Передайте напряжение инвертора IGBTs
Diode — Напряжение0 (значение по умолчанию)Передайте напряжение диодов инвертора.
Inverter> Snubbers
Resistance (ohm) — Сопротивление10e3 (значение по умолчанию)Сопротивление демпферов инвертора. Чтобы устранить демпферы из инвертора, задайте inf.
Capacitance(F) — Емкость20e-9 (значение по умолчанию)Емкость демпферов инвертора. Чтобы устранить демпферы из модели, задайте 0. Для резистивных демпферов задайте inf.
Regulation type — Тип регулированияSpeed regulation (значение по умолчанию) | Torque regulationТип регулирования контроллер выполняет.
Выбор Speed regulation включает Speed cutoff frequency (Hz), Speed ramps и параметры PI regulator.
Speed controller
Speed controller sampling time (s) — 'SampleTime' 7*20e-6 (значение по умолчанию)Время выборки должно быть кратным шагу времени симуляции.
Speed cutoff frequency (Hz) — Частота1000 (значение по умолчанию)Частота среза фильтра нижних частот первого порядка контроллера скорости.
Выбор Speed regulation для параметра Regulation type включает этот параметр.
Speed controller> Speed ramps (rpm/s)
Acceleration — Скорость1800 (значение по умолчанию)Максимальное изменение скорости позволено во время моторного ускорения в об/мин/с. Чрезмерно большое положительное значение может вызвать пониженное напряжение шины DC.
Выбор Speed regulation для параметра Regulation type включает этот параметр.
Deceleration — Скорость-1800 (значение по умолчанию)Максимальное изменение скорости позволено во время моторного замедления в об/мин/с. Чрезмерно большая отрицательная величина может вызвать повышенное напряжение шины DC.
Выбор Speed regulation для параметра Regulation type включает этот параметр.
Speed controller> PI regulator
Proportional gain — Усиление1 (значение по умолчанию)Контроллер скорости пропорциональное усиление.
Выбор Speed regulation для параметра Regulation type включает этот параметр.
Integral gain — Усиление0.001 (значение по умолчанию)Контроллер скорости интегральное усиление.
Выбор Speed regulation для параметра Regulation type включает этот параметр.
Speed controller> Torque output limits (N.m)
Negative — Усиление-4 (значение по умолчанию)Максимальный отрицательный потребованный крутящий момент применился к двигателю текущим контроллером в N.m.
Выбор Speed regulation для параметра Regulation type включает этот параметр.
Positive — Усиление4 (значение по умолчанию)Максимальный положительный потребованный крутящий момент применился к двигателю текущим контроллером в N.m.
Выбор Speed regulation для параметра Regulation type включает этот параметр.
Machine flux
Initial — Поток0.3 (значение по умолчанию)Начальный моторный поток.
Nominal — Поток0.3 (значение по умолчанию)Номинальный моторный поток.
Vector controller
Чтобы видеть схематику для ориентированного на поле управления и управления прямого крутящего момента, нажмите Schematic.
Controller type — Модель управленияFOC (значение по умолчанию) | DTC (two-level hysteresis) | DTC (three-level hysteresis)Тип управления.
Выбор FOC включает параметр Current controller hysteresis bandwidth (A). Выбор DTC (two-level hysteresis) или DTC (three-level hysteresis) включает параметры Flux controller hysteresis bandwidth (Wb) и Torque controller hysteresis bandwidth (N-m).
Current controller hysteresis bandwidth (A) — Гистерезисная пропускная способность0.5 (значение по умолчанию)Общая пропускная способность в Текущем режиме управления, распределенном симметрично вокруг текущего сетбола. Эта фигура иллюстрирует случай, где текущим сетболом является Is*, и текущая гистерезисная пропускная способность установлена в dx.
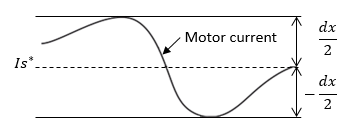
Выбор FOC для параметра Controller type включает этот параметр.
Torque controller hysteresis bandwidth (N-m) — Гистерезисная пропускная способность0.1 (значение по умолчанию)Общая пропускная способность, распределенная симметрично вокруг сетбола крутящего момента. Эти данные показывают случай, где сетболом крутящего момента является Te*, и пропускная способность гистерезиса крутящего момента установлена в dTe.

Выбор DTC (two-level hysteresis) или DTC (three-level hysteresis) для параметра Controller type включает этот параметр.
Torque controller hysteresis bandwidth (N-m) — Гистерезисная пропускная способность0.1 (значение по умолчанию)Общая пропускная способность, распределенная симметрично вокруг сетбола потока. Эти данные показывают случай, где сетбол потока является Ψ*, и пропускная способность гистерезиса крутящего момента установлена в dΨ.

Выбор DTC (two-level hysteresis) или DTC (three-level hysteresis) для параметра Controller type включает этот параметр.
Flux controller hysteresis bandwidth (N-m) — Гистерезисная пропускная способность0.002 (значение по умолчанию)Общая пропускная способность, распределенная симметрично вокруг сетбола крутящего момента. Эти данные показывают случай, где сетболом крутящего момента является Те*, и пропускная способность гистерезиса крутящего момента установлена в dΨ.
Выбор DTC (two-level hysteresis) или DTC (three-level hysteresis) для параметра Controller type включает этот параметр.
Maximum switching frequency (Hz) — Частота20000 (значение по умолчанию)Максимальная частота переключения инвертора.
Controller sampling time (s) — 'SampleTime' 20e-6 (значение по умолчанию)Время выборки должно быть кратным шагу времени симуляции.

