Управление переменной скоростью AC электрические машины использует принудительно коммутируемые электронные переключатели, такие как IGBTs, МОП-транзисторы и GTOs. Асинхронные машины, питаемые напряжением получило конвертеры (VSC) модуляции ширины импульса (PWM), в наше время постепенно заменяют двигатели постоянного тока и тиристорные мосты. С PWM, объединенным с современными методами управления такой как ориентированные на поле на управление или прямое управление крутящим моментом, можно получить ту же гибкость в скорости и закрутить управление как с машинами DC. Этот пример показывает, как создать простой диск AC разомкнутого цикла, управляющий асинхронной машиной. Специализированные Энергосистемы Simscape™ Electrical™ содержат библиотеку предварительно созданных моделей, которые позволяют вам моделировать системы электроприводов без потребности создать те сложные системы самим. Для получения дополнительной информации об этой библиотеке, смотрите Библиотеку Электроприводов.
Библиотека Machines содержит четыре из обычно используемых трехфазных машин: упрощенные и полные синхронные машины, асинхронная машина и постоянный магнит синхронная машина. Каждая машина может использоваться или в генераторе или в моторном режиме. Объединенный с линейными и нелинейными элементами, такими как преобразователи, строки, загрузки, прерыватели, и т.д., они могут использоваться, чтобы моделировать электромеханические переходные процессы в электрической сети. Они могут также быть объединены с электронными устройствами степени, чтобы моделировать диски.
Библиотека Power Electronics содержит блоки, разрешающие вам моделировать диоды, тиристоры, тиристоры GTO, МОП-транзисторы и устройства IGBT. Вы могли соединить несколько блоков вместе, чтобы создать трехфазный мост. Например, мост инвертора IGBT потребовал бы шести IGBTs и шести антипараллельных диодов.
Чтобы упростить реализацию мостов, Универсальный Мостовой брус автоматически выполняет эти соединения для вас.
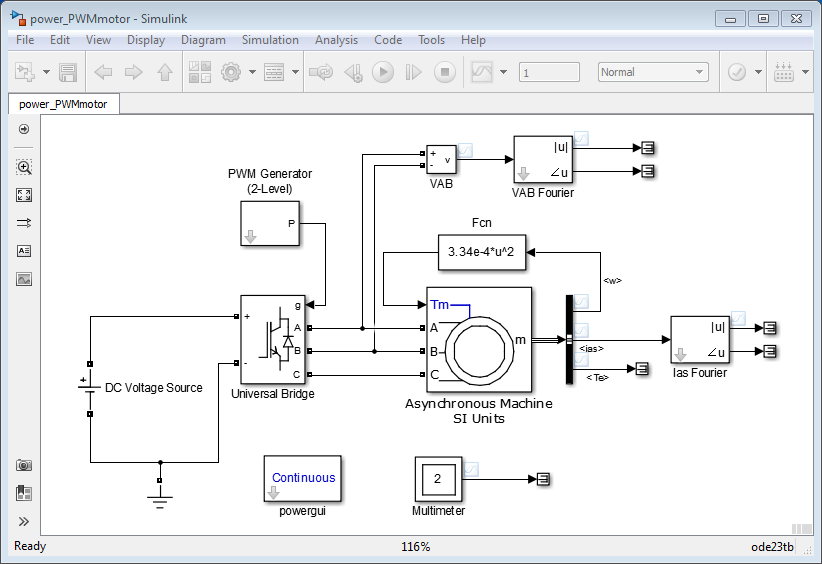
Выполните эти шаги, чтобы создать PWM-управляемый двигатель.
Введите power_new в командной строке, чтобы открыть новую модель. Сохраните его как power_PWMmotor.
Откройте библиотеку Power Electronics и скопируйте Универсальный Мостовой брус в вашу модель.
Откройте диалоговое окно Universal Bridge и установите его параметры можно следующим образом:
Электронное устройство степени |
| |
Демпфер | ||
RS |
| |
Cs |
| |
Рон |
| |
Передайте напряжения | ||
VF устройства | 0 В | |
Диод Vfd |
| |
Откройте библиотеку Machines. Скопируйте блок Asynchronous Machine SI Units в свою модель.
Откройте диалоговое окно Asynchronous Machine и установите его параметры можно следующим образом:
Nominal power, voltage (line-line), and frequency | [ 3*746, 220, 60 ] |
Stator resistance and inductance | [ 1.115 0.005974 ] |
Rotor resistance and inductance | [ 1.083 0.005974 ] |
Mutual inductance | 0.2037 |
Inertia, friction factor, and pole pairs | [ 0.02 0.005752 2 ] |
Initial conditions | [1 0 0 0 0 0 0 0] |
При установке номинальной степени на 3*746 ВА и номинальной строки к линейному напряжению Vn к 220 Vrms реализует 3 л. с., машина на 60 Гц с двумя парами полюсов. Его номинальная скорость поэтому немного ниже, чем синхронная скорость 1 800 об/мин или ws = 188,5 рад/с.
Установите параметр Rotor type на Squirrel cage и обратите внимание, что три терминала ротора, a, b, и c не доступны, потому что во время нормальной моторной операции эти терминалы должны быть закорочены вместе.
Соедините блок Селектора Шины при измерении вывод машины. Когда этот блок соединяется с измерением машины вывод, он позволяет вам получать доступ к определенным внутренним сигналам машины. Выберите следующие сигналы: измерения Статора. Статор текущий is_a (A), Механическое устройство. Скорость ротора (wm) и Механическое устройство. Электромагнитный крутящий момент Те (N*m).
Вы теперь реализуете характеристику скорости крутящего момента моторной загрузки. Примите квадратичную характеристику скорости крутящего момента (вентилятор, или накачайте загрузку типа). Крутящий момент T затем пропорционален квадрату скорости ω.
Номинальный крутящий момент двигателя
Поэтому постоянный k должен быть
Откройте библиотеку User-Defined Functions Simulink® и скопируйте блок Fcn в вашу модель. Откройте меню блока и введите выражение крутящего момента как функция скорости: 3.34e-4*u^2.
Соедините вывод блока Fcn к входу крутящего момента двигателя, маркировал Tm.
Откройте библиотеку Electrical Sources и скопируйте Исходный блок напряжения постоянного тока в вашу модель. Откройте меню блока и установите напряжение на 400 В.
Откройте библиотеку Measurements и скопируйте блок Voltage Measurement в вашу модель. Измените имя блока на VAB.
Используя блок Ground от библиотеки Elements, завершите элементы степени и соединения датчика напряжения как показано в схеме модели power_PWMmotor.
Чтобы управлять вашим мостом инвертора, вам нужен импульсный генератор. Такой генератор доступен в библиотеке Control и Measurements/Measurements:
Откройте Управление и библиотеку блоков Measurements/Pulse & Signal Generators и скопируйте блок PWM Generator (2-уровневый) в вашу модель. Конвертер действует в разомкнутом цикле и трех PWM, модулирующие сигналы сгенерированы внутренне. Соедините P вывод с входом импульсов Универсального Мостовой бруса
Откройте диалоговое окно блока PWM Generator (2-уровневый) и установите параметры можно следующим образом.
Тип генератора |
|
Режим работы |
|
Частота |
|
Начальная фаза |
|
Минимальные и максимальные значения | [-1,1] |
Выборка метода |
|
Внутренняя генерация ссылочного сигнала |
|
Индекс модуляции | 0.9 |
Ссылочная частота сигнала |
|
Ссылочная фаза сигнала |
|
'SampleTime' |
|
Блок был дискретизирован так, чтобы импульсы изменились во множителях шага требуемого времени. Временной шаг 10 мкс соответствует +/-0,54% переключающегося периода на уровне 1 080 Гц.
Одна общепринятая методика генерации импульсов PWM использует сравнение выходного напряжения, чтобы синтезировать (60 Гц в этом случае) с треугольной волной на переключающейся частоте (1 080 Гц в этом случае). Выходное напряжение RMS от строки к строке является функцией входного напряжения DC и индекса m модуляции, как дано следующим уравнением:
Поэтому напряжение постоянного тока 400 В и фактор модуляции 0,90 приводят к 220 Vrms строка к линейному напряжению вывода, которая является номинальным напряжением асинхронного двигателя.
Вы теперь добавляете блоки, измеряющие основной компонент (60 Гц), встроенных в прерванное напряжение Vab и в фазу ток. Откройте библиотеку Control и Measurements simscapepowersystems_ST библиотеки и скопируйте блок Фурье в вашу модель.
Откройте диалоговое окно блока Фурье и проверяйте, что параметры устанавливаются можно следующим образом:
Основная частота |
|
Гармоника n | 1 |
Начальный вход | [0 0] |
'SampleTime' |
|
Соедините этот блок с выводом датчика напряжения Vab.
Копируйте блок Фурье. Чтобы измерить фазу ток, вы соединяете этот блок со Статором текущий is_a вывод блока селектора Шины.
Передайте эти сигналы потоком Инспектору Данных моделирования: Те, МСФО и w сигналы измерения вывод блока Asynchronous Machine и напряжение VAB.
Установите время остановки на 1 s и запустите симуляцию. Откройте Simulation Data Inspector и посмотрите на сигналы.
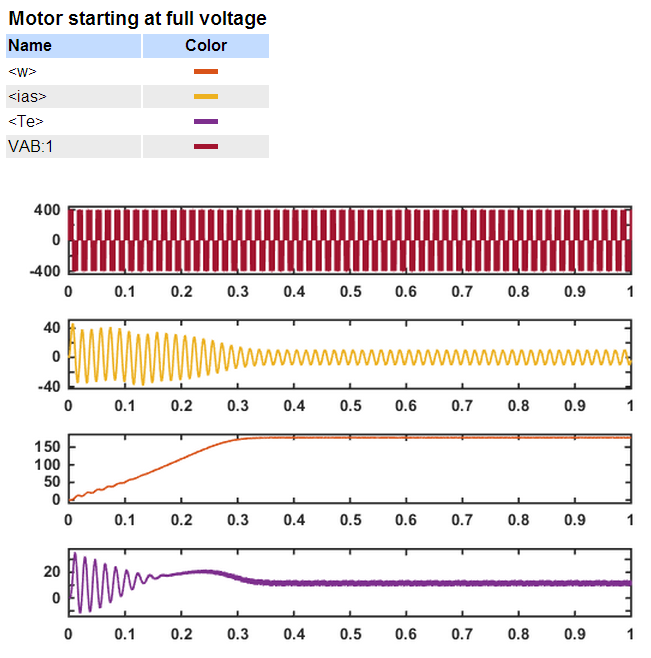
Двигатель запускает и достигает своей установившейся скорости 181 рад/с (1 728 об/мин) после 0,5 с. При запуске, значении текущего пика пределов 90 А на 60 Гц (RMS на 64 А), тогда как ее установившееся значение составляет 10,5 А (RMS на 7,4 А). Как ожидалось значение напряжения на 60 Гц, содержавшегося в прерванной волне, остается в
Также заметьте сильные колебания электромагнитного крутящего момента при запуске. Если вы увеличиваете масштаб крутящего момента в устойчивом состоянии, необходимо наблюдать сигнал с шумом со средним значением 11.9 N.m, соответствуя крутящему моменту загрузки на номинальной скорости.
Если вы увеличиваете масштаб трех моторных токов, вы видите, что все гармоники (множители 1 080 Гц, переключающих частоту), отфильтрованы индуктивностью статора, так, чтобы компонент на 60 Гц был доминирующим.
Электропривод PWM; результаты симуляции для моторного запуска при полном напряжении
Универсальный Мостовой брус не является обычной подсистемой, где все шесть отдельных переключателей доступны. Если вы хотите измерить напряжения переключателя и токи, необходимо использовать блок Multimeter, который предоставляет доступ в мост внутренние сигналы:
Откройте диалоговое окно Universal Bridge и установите параметр Измерения на Device currents.
Скопируйте блок Multimeter от библиотеки Measurements в вашу схему. Дважды кликните блок Multimeter. Окно, показывающее шесть токов переключателя, появляется.
Выберите два тока плеча мостовой схемы, соединенного с фазой A. Они идентифицированы как
iSw1 |
|
iSw2 |
|
Нажмите Close. Количество сигналов (2) отображено в значке Мультиметра.
Отправьте сигнал от блока Multimeter до Инспектора Данных моделирования.
Перезапустите симуляцию. Формы волны, полученные для первых 20 мс, показывают в этом графике.
Токи в Переключателях 1 и 2 IGBT/Diode
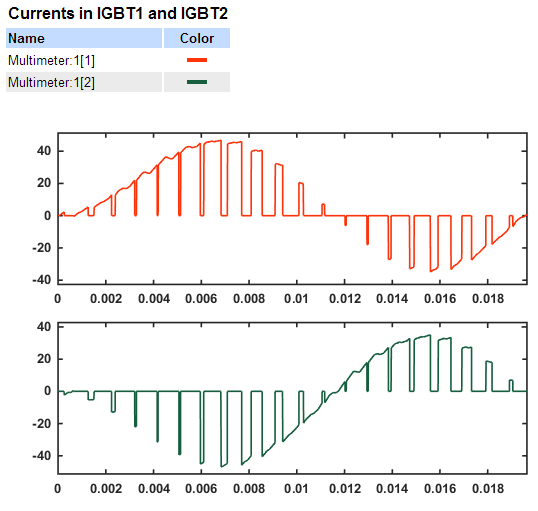
Как ожидалось токи в переключателях 1 и 2 дополнительны. Положительный ток указывает на текущее течение в IGBT, тогда как отрицательный ток указывает на ток в антипараллельном диоде.
Использование блока Multimeter не ограничивается Универсальным Мостовой брусом. Много блоков библиотек Electrical Sources и Elements имеют параметр Измерения, где можно выбрать напряжения, токи или насыщаемые потоки преобразователя. Разумное использование блока Multimeter сокращает количество текущих и датчиков напряжения в вашей схеме, облегчая следовать.
Вы можете заметить, что симуляция с помощью алгоритма интегрирования переменного шага относительно долга. В зависимости от вашего компьютера могут потребоваться десятки секунд, чтобы моделировать одну секунду. Чтобы сократить время симуляции, можно дискретизировать схему и моделировать на фиксированных шагах времени симуляции.
В диалоговом окне Simulation > Configuration Parameters > Solver выберите опции Discrete (no continuous states) и Fixed-step. Откройте блок powergui и установите тип Симуляции на Discrete. Установите Шаг расчета на 10e-6 s. Энергосистема, включая асинхронную машину, теперь дискретизируется в 10 шагах расчета мкс.
Запустите симуляцию. Заметьте, что симуляция теперь быстрее, чем с непрерывной системой. Результаты соответствуют хорошо непрерывной системе.
Два блока Фурье позволяют вычисление основного компонента напряжения и текущий, в то время как симуляция запускается. Если бы требуется наблюдать гармонические компоненты, также вам был бы нужен блок Фурье для каждой гармоники. Этот подход не удобен.
Добавьте блок Scope в свою модель и соедините ее при выводе блока VAB Voltage Measurement. В свойствах настройки блока Scope перейдите к Log data to workspace > Save format и выберите Structure With Time. Запустите симуляцию. Теперь используйте инструмент FFT powergui, чтобы отобразить спектр частоты напряжения и форм тока.
Когда симуляция будет завершена, откройте powergui и выберите FFT Analysis. Новое окно открывается. Установите параметры, задающие анализируемый сигнал, окно времени и частотный диапазон можно следующим образом:
|
Name |
|
|
Input |
|
|
Signal number |
1 |
|
Start time |
|
|
Number of cycles |
2 |
|
Display |
|
|
Fundamental frequency |
|
|
Max frequency |
|
|
Frequency axis |
|
|
Display style |
|
Анализируемый сигнал отображен в верхнем окне. Нажмите Display. Спектр частоты отображен в нижнем окне, как показано в следующей фигуре.
Анализ БПФ моторной строки к линейному напряжению
Основное и общее гармоническое искажение (THD) компонента напряжения Vab отображено выше окна спектра. Значение основного принципа напряжения инвертора (312 В) соответствует хорошо теоретическому значению (311 В для m=0.9).
Гармоники отображены в проценте основного компонента. Как ожидалось гармоники происходят вокруг множителей несущей частоты (n*18 + - k). Самые высокие гармоники (30%) появляются в 16-й гармонике (18 - 2) и 20-й гармонике (18 + 2).
