Постоянный магнит синхронная машина, ориентированная на поле на управление
Simscape / Электрический / Управление / Управление PMSM

PMSM, Ориентированный на поле на Блок управления, реализует ориентированную на поле управляющую структуру для постоянного магнита синхронной машины (PMSM). Поле ориентированное управление (FOC) является производительной стратегией управления электродвигателя переменного тока, которая разъединяет крутящий момент и поток путем преобразования стационарных токов фазы к вращающемуся кадру. Используйте FOC, когда скорость ротора и положение известны, и ваше приложение требует:
Высоко закрутите и низко текущий при запуске.
Высокая эффективность.
Структура FOC PMSM разъединяет крутящий момент и поток при помощи ротора d-q ссылочный кадр. Эта схема показывает полную архитектуру блока.
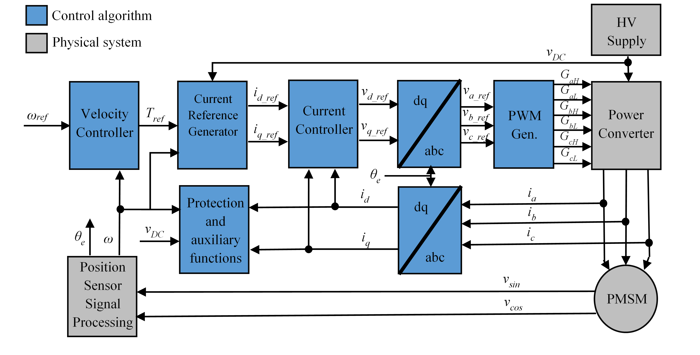
В схеме:
ω и ωref являются измеренными и ссылочными угловыми скоростями, соответственно.
Tref является ссылочным электромагнитным крутящим моментом.
i и v являются токами статора и напряжениями, и преобразовывает в нижний индекс d, и q представляют d-ось и q-ось, и преобразовывает в нижний индекс a, b и c, представляйте три обмотки статора.
θe является ротором электрический угол.
G является импульсом логического элемента, преобразовывает в нижний индекс H и L, представляйте высоко и низко, и преобразовывает в нижний индекс a, b, и c представляет три обмотки статора.
Можно принять решение реализовать или скорость или управление крутящим моментом с параметром Control mode. Блок реализует скоростное управление точно как показано в схеме. Блок реализует управление крутящим моментом путем удаления блока Velocity Controller и принятия ссылочного крутящего момента непосредственно.
Параметры машины известны.
Управляющая структура реализована с одной частотой дискретизации.
[1] Bernardes, T., В. Ф. Монтэгнер, Х. А. Грюндлинг и Х. Пинейро. "Дискретное время двигая наблюдателя режима для sensorless векторного управления постоянного магнита синхронная машина". Транзакции IEEE на Industrial Electronics. Издание 61, Номер 4, 2014, стр 1679–1691.
[2] Carpiuc, S. и К. Лазарь. "Быстро ограниченное прогнозирующее текущее управление в реальном времени в постоянном магните синхронные основанные на машине автомобильные диски тяги". Транзакции IEEE на Электрификации Транспортировки. Vol.1, Номер 4, 2015, стр 326–335.
[3] Хак, M. E. Л. Чжун и М. Ф. Рахман. "Улучшенная траектория управляет для внутреннего постоянного магнита синхронным электроприводом с расширенным операционным пределом". Журнал Electrical & Electronics Engineering. Издание 22, Номер 1, 2003, p. 49.
[4] Ян, N., Г. Ло, В. Лю и К. Ван. "Внутренний постоянный магнит синхронный блок управления приводом для электромобиля с помощью интерполяционной таблицы". На 7-й Международной Конференции по Управлению Силовой электроникой и Движением. Издание 2, 2012, стр 1015–1019.
