Идеальная поведенческая модель простого датчика расстояния
Simscape / Электрический / Sensors & Transducers

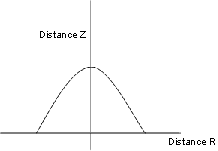
Блок Proximity Sensor представляет простой датчик близости. Распознающееся расстояние Z задано как расстояние, нормальное на поверхность датчика, в которой датчик обнаруживает объект для данного радиального смещения R, как показано в следующей фигуре.

Типичную кривую расстояния обнаружения показывают в следующей фигуре.
Вывод моделируется электрическим переключателем, который может или быть Обычно Открыт (N.O). или Обычно закрытый (Северная Каролина). когда никакой объект не обнаруживается.
Радиальное расстояние до датчика
Перпендикулярное расстояние до датчика
Положительное электрическое напряжение
Отрицательное электрическое напряжение
Вектор расстояний от датчика до объекта, разрешенного в плоскость, тангенциальную к сенсорной головке. Значение по умолчанию является мм [ -25 -20 -15 -10 -5 0 5 10 15 20 25 ].
Вектор расстояний от датчика до объекта, разрешенного относительно вектора нормали в сенсорной головке. Значение по умолчанию является мм [ 0 0 5 8 9.5 10 9.5 8 5 0 0 ].
Указывает, является ли выводом Normally Open (N.O.), означая, что вывод становится закрытым только, когда объект обнаруживается, или Normally Closed (N.C.), означая, что вывод становится открытым только, когда объект обнаруживается. Значением по умолчанию является Normally Open (N.O.).
Сопротивление между + и - порты, когда выходные контакты закрываются. Значением по умолчанию является 0.01 Ω.
Проводимость между + и - порты, когда выходные контакты открыты. Значением по умолчанию является 1e-08 1 / Ω.
