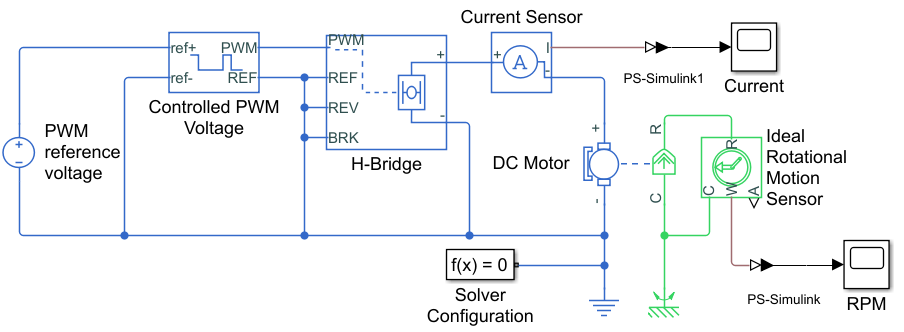
В этом примере вы моделируете двигатель постоянного тока, управляемый постоянным входным сигналом, который аппроксимирует длительность импульса модулируемый сигнал, и посмотрите на текущее и вращательное движение при моторном выводе.
Чтобы видеть завершенную модель, откройте PWM-управляемый пример двигателя постоянного тока.
Выберите блоки, чтобы представлять входной сигнал, двигатель постоянного тока и моторные выходные отображения.
Следующая таблица описывает роль блоков, которые представляют компоненты системы.
Блок | Описание |
|---|---|
| Solver Configuration | Задает настройки решателя, которые применяются ко всем физическим блокам моделирования |
| PS-Simulink Converter | Преобразовывает входной физический сигнал в сигнал Simulink® |
| Controlled PWM Voltage | Генерирует сигнал, который аппроксимирует длительность импульса модулируемый моторный входной сигнал |
| H-Bridge | Управляет двигателем постоянного тока |
| DC Motor | Преобразовывает входную электроэнергию в механическое движение |
| Current Sensor | Преобразовывает электрический ток, который управляет двигателем в измеримый физический сигнал, пропорциональный току |
| DC Voltage Source | Генерирует напряжение постоянного тока |
| Electrical Reference | Обеспечивает электрическую землю |
| Mechanical Rotational Reference | Обеспечивает механическую землю |
| Ideal Rotational Motion Sensor | Преобразовывает вращательное движение двигателя в измеримый физический сигнал, пропорциональный движению |
| Scope | Двигатель отображений текущее и вращательное движение |
Создайте новую модель.
Добавьте в модель блоки, перечисленные в следующей таблице. Столбец Библиотеки таблицы задает иерархический путь к каждому блоку.
Блок | Библиотека | Количество |
|---|---|---|
| Solver Configuration | Simscape> Utilities | 1 |
| PS-Simulink Converter | Simscape> Utilities | 2 |
| Controlled PWM Voltage | Simscape> Electrical> Integrated Circuits | 1 |
| H-Bridge | Simscape> Electrical> Semiconductors & Converters> Converters | 1 |
| DC Motor | Simscape> Electrical> Electromechanical> Brushed Motors | 1 |
| Current Sensor | Simscape> Foundation Library> Electrical> Electrical Sensors | 1 |
| DC Voltage Source | Simscape> Foundation Library> Electrical> Electrical Sources | 1 |
| Electrical Reference | Simscape> Foundation Library> Electrical> Electrical Elements | 1 |
| Mechanical Rotational Reference | Simscape> Foundation Library> Mechanical> Rotational Elements | 1 |
| Ideal Rotational Motion Sensor | Simscape> Foundation Library> Mechanical> Mechanical Sensors | 1 |
| Scope | Simulink> Commonly Used Blocks | 2 |
Можно использовать функцию Simscape™ ssc_new с доменным типом electrical, чтобы создать модель Simscape, которая содержит эти блоки:
Simulink-PS Converter
PS-Simulink Converter
Scope
Solver Configuration
Electrical Reference
Переименуйте и соедините блоки как показано в схеме.
Теперь вы готовы задать параметры блоков.
Задайте следующие параметры, чтобы представлять поведение компонентов системы:
Следующие блоки указывают информацию модели, которая не характерна для конкретного блока:
Настройка решателя
Электрическая ссылка
Механическая вращательная ссылка
Как с моделями Simscape, необходимо включать Блок Configuration Решателя в каждую топологически отличную физическую сеть. Этот пример имеет одну физическую сеть, так используйте один Блок Configuration Решателя со значениями параметров по умолчанию.
Необходимо включать блок Electrical Reference в каждую сеть Simscape Electrical™. Необходимо включать блок Mechanical Rotational Reference в каждую сеть, которая включает электромеханические блоки. Эти блоки не имеют никаких параметров.
Для получения дополнительной информации об использовании ссылочных блоков см. Основывающиеся Правила (Simscape).
Вы генерируете моторный входной сигнал с помощью этих блоков:
Исходный блок напряжения постоянного тока (напряжение ссылки PWM) генерирует постоянный сигнал.
Блок Controlled PWM Voltage генерирует длительность импульса модулируемый сигнал.
H-мостовой-брус управляет двигателем.
В этом примере все входные порты H-мостовой-бруса кроме порта PWM соединяются с землей. В результате H-мостовой-брус ведет себя можно следующим образом:
Когда двигатель работает, H-мостовой-брус соединяет моторные терминалы с источником питания.
Когда двигатель выключен, действия H-мостовой-бруса как вольный диод, чтобы поддержать моторный ток.
В этом примере вы моделируете двигатель с постоянным током, значение которого является средним значением сигнала PWM. При помощи этого типа сигнала вы настраиваете быструю симуляцию, которая оценивает моторное поведение.
Установите параметры Исходного блока напряжения постоянного тока можно следующим образом:
Constant voltage к 2.5
Установите Управляемые параметры блоков Напряжения PWM можно следующим образом:
PWM frequency к 4000
Simulation mode к Averaged
Это значение говорит блоку генерировать выходной сигнал, значение которого является средним значением сигнала PWM. Симуляция двигателя с усредненным сигналом оценивает моторное поведение в присутствии сигнала PWM. Чтобы подтвердить это приближение, используйте значение PWM для этого параметра.
Установите параметры H-мостовой-бруса можно следующим образом:
Simulation mode к Averaged
Это значение говорит блоку генерировать выходной сигнал, значение которого является средним значением сигнала PWM. Симуляция двигателя с усредненным сигналом оценивает моторное поведение в присутствии сигнала PWM. Чтобы подтвердить это приближение, используйте значение PWM для этого параметра.
Режим симуляции и для Управляемого Напряжения PWM и для H-мостовой-брусьев должен быть тем же самым.
Сконфигурируйте блок, это моделирует двигатель.
Установите Моторные параметры блоков можно следующим образом, оставив модульные настройки в их значениях по умолчанию где применимыми:
Вкладка Electrical Torque:
Model parameterization к By rated power, rated speed & no-load speed
Armature inductance к 0.01
No-load speed к 4000
Rated speed (at rated load) к 2500
Rated load (mechanical power) к 10
Rated DC supply voltage к 12
Вкладка Mechanical:
Rotor inertia к 2000
Rotor damping к 1e-06
Задайте параметры блоков, которые создают моторное текущее отображение:
Блок Current Sensor
Блок PS-Simulink Converter1
Осциллограф Current
Из трех блоков только блок PS-Simulink Converter1 имеет параметры. Установите блок PS-Simulink Converter1 параметр Output signal unit на A указывать, что входной сигнал блока имеет модули ампер.
Задайте параметры блоков, которые создают моторное отображение крутящего момента:
Идеальный блок Rotational Motion Sensor
Блок PS-Simulink Converter
Осциллограф RPM
Из трех блоков только блок PS-Simulink Converter имеет параметры, которые необходимо сконфигурировать для этого примера. Установите блок PS-Simulink Converter параметр Output signal unit на rpm указывать, что входной сигнал блока имеет модули оборотов в минуту.
Необходимо ввести это значение параметров. Это не доступно в выпадающем списке.
Сконфигурируйте параметры решателя, чтобы использовать непрерывно-разовый решатель потому что модели Simscape Electrical, только запущенные с непрерывно-разовым решателем. Увеличьте максимальный размер шага, решатель может взять так выполнения симуляции быстрее.
В окне модели выберите Simulation> Model Configuration Parameters, чтобы открыть диалоговое окно Configuration Parameters.
Выберите ode15s (Stiff/NDF) из списка Solver.
Расширьте Additional options и введите 1 для значения параметров Max step size.
Нажмите OK.
Для получения дополнительной информации о конфигурировании параметров решателя, смотрите Симуляцию Электронной, Мехатронной Системы, или Электроэнергии.
В этой части примера вы запускаете симуляцию и строите результаты.
В окне модели выберите Simulation> Run, чтобы запустить симуляцию.
Чтобы просмотреть моторный ток и крутящий момент в окнах Scope, дважды кликните блоки Scope. Можно сделать это прежде или после того, как вы запустите симуляцию.
По умолчанию отображения осциллографа кажутся сложенными друг на друге на экране, таким образом, можно только видеть одного из них. Перетащите окна, чтобы изменить местоположение их.
Следующий график показывает моторный ток.
Моторный ток

Следующий график показывает моторного об/мин.
Моторный об/мин
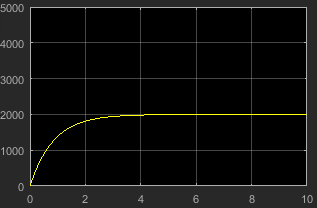
Как ожидалось двигатель запускается на уровне приблизительно 2 000 об/мин, когда прикладное напряжение постоянного тока составляет 2,5 В.
