

Агент изучения укрепления
Reinforcement Learning Toolbox
![]()
Используйте блок RL Agent, чтобы моделировать и обучить агент изучения укрепления в Simulink®. Вы сопоставляете блок с агентом, сохраненным в рабочей области MATLAB® или словаре данных как объект агента, такой как объект rlACAgent или rlDDPGAgent. Вы соединяете блок так, чтобы он получил наблюдение и вычисленное вознаграждение. Например, рассмотрите следующую блок-схему модели SimplePendulumModel.
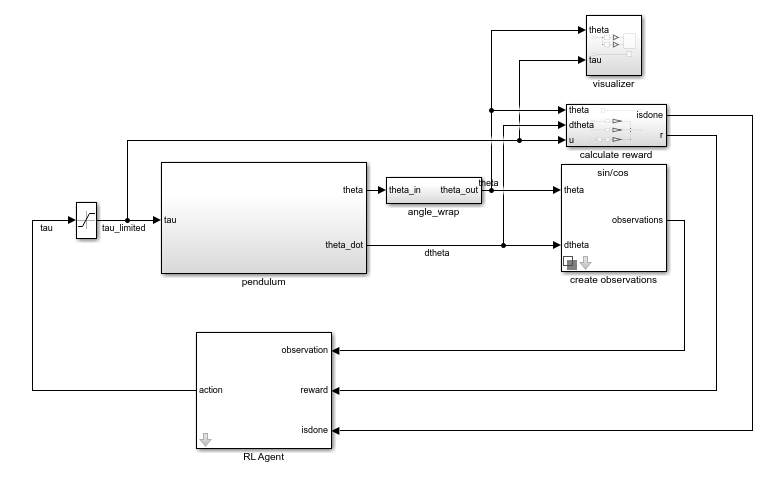
Входной порт observation блока RL Agent получает сигнал, который выведен от мгновенного угла и угловой скорости маятника. Порт reward получает вознаграждение, вычисленное от тех же двух значений и прикладного действия. Вы конфигурируете наблюдения и вознаграждаете вычисления, которые соответствуют вашей системе.
Блок использует агент, чтобы сгенерировать действие на основе наблюдения и вознаграждения, которое вы предоставляете. Соедините выходной порт action с соответствующим входом для вашей системы. Например, в SimplePendulumModel, порт action является крутящим моментом, применился к системе маятника. Для получения дополнительной информации об этой модели, смотрите Train Агент DQN к Swing и Маятнику Баланса.
Чтобы обучить агент изучения укрепления в Simulink, вы генерируете среду из модели Simulink. Вы затем создаете и конфигурируете агент для обучения против той среды. Для получения дополнительной информации смотрите, Создают окружения Simulink для Изучения Укрепления. Когда вы вызываете train с помощью среды, train моделирует модель и обновляет агент, сопоставленный с блоком.

