Ответ неродной сигнала объекта рациональной функции
[yout,tout] = stepresp(h, ts, n, trise)
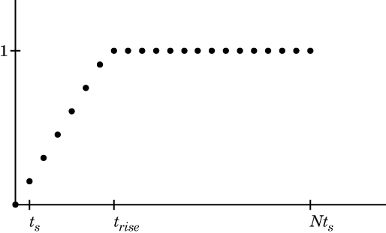
[yout,tout] = stepresp(h, ts, n, trise) вычисляет ответ временного интервала объекта рациональной функции, h, к сигналу шага, заданному как:
Вход h является указателем объекта рациональной функции, возвращенного rationalfit. Переменная ts является шагом расчета, ts; N является количеством выборок, n; и trise является временем, trise, который это берет для сигнала шага достигнуть его максимального значения. Переменная k является целым числом между 0 и N, относясь к индексу выборок.
Следующая фигура иллюстрирует конструкцию этого сигнала.
Вывод yout является ответом сигнала шага во время tout.
Вычислите переходной процесс объекта рациональной функции из файла passive.s2p. Считайте passive.s2p.
S = sparameters('passive.s2p');
freq = S.Frequencies;Получите S11 и преобразуйте в передаточную функцию TDR.
s11 = rfparam(S,1,1); Vin = 1; tdrfreqdata = Vin*(s11+1)/2;
Подгонка к объекту рациональной функции.
tdrfit = rationalfit(freq,tdrfreqdata);
Задайте параметры для сигнала шага. Задайте параметры для сигнала шага
Ts = 1.0e-11; N = 10000; Trise = 1.0e-10;
Вычислите переходной процесс для TDR и постройте его
[tdr,t1] = stepresp(tdrfit,Ts,N,Trise); figure plot(t1*1e9,tdr) ylabel('TDR') xlabel('Time (ns)')

