Если вы используете Embedded Coder®, можно сгенерировать допускающий повторное использование, повторно используемый код путем представления алгоритма как ограниченного по объему Функционального блока Simulink. Примеры того, когда сгенерировать повторно используемый код от Функциональных блоков Simulink, - когда функция совместно использует состояние между функциональными вызывающими сторонами в модели или для клиент-серверных приложений. Можно сгенерировать код, который высоко построен из модулей при помощи нескольких экземпляров разделяемого Функционального блока Simulink в модели экспорта функций. Генератор кода производит функциональный код и сопоставляет каждое использование или вызов функции со специфичными для экземпляра данными. Осциллограф функции зависит от того, помещаете ли вы функцию на корневом уровне модели или в подсистеме.
Генератор кода производит повторно используемый функциональный код, когда вы конфигурируете a:
Топ-модель с образцовым набором упаковки интерфейса Code параметра конфигурации к Reusable function или C++ class (только C++).
Модель, на которую ссылаются, с Общим количеством экземпляров позволила на топ-модель (Simulink) набор к Multiple.
Вызовите функцию, представленную ограниченным по объему Функциональным блоком Simulink от одного уровня выше на том же уровне, или от уровня ниже уровня функционального определения. Можно определить объем функции в атомарной или невиртуальной подсистеме, но доступность вызова функции ограничивается тем же уровнем или ниже иерархии. Имя функции не должно быть уникальным.
Прежде и в то время как вы разрабатываете свою модель, рассмотрите:
Сколько экземпляров каждой функции требуется?
Необходимо ли ограничить сайты вызова для функции к модели, содержащей функциональное определение?
Вы должны для функции взаимодействовать через интерфейс с сигналами в окружении, но сохранить те сигналы скрытыми от вызывающих сторон?
Функции должны связаться непосредственно друг с другом?
Функции должны соединиться с внешним вводом-выводом?
Необходимо ли регистрировать функциональный вывод?
Используйте компонент модели в качестве примера rtwdemo_comp, чтобы видеть, как использовать Функциональные блоки Simulink, чтобы сгенерировать повторно используемый код С. Используйте модель rtwdemo_comp_cpp в качестве примера, если вы предпочитаете генерировать Код С++. Откройте модель и исследуйте иерархию модели.
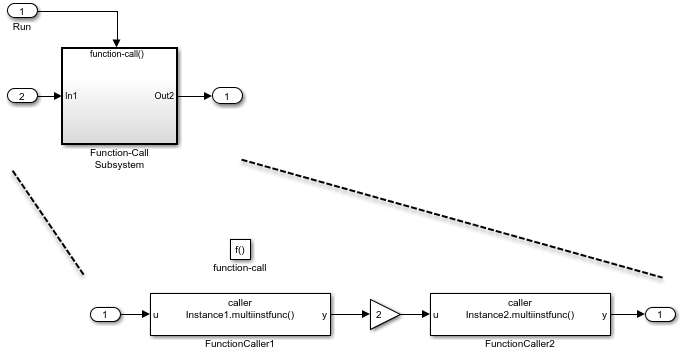
Верхний уровень модели включает подсистему вызова функций и два экземпляра модели, на которую ссылаются.
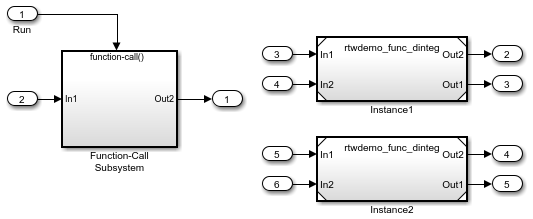
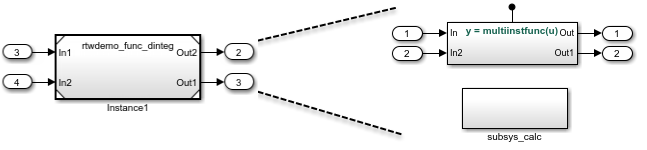
Модель, на которую ссылаются, rtwdemo_func_dinteg, состоит из Функционального блока Simulink, который задает функциональный multiinstfunc и подсистему subsys_calc.
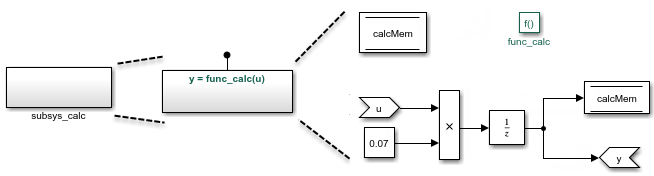
Подсистема состоит из Функционального блока Simulink. Это использование Функционального блока Simulink показывает, как можно ограничить осциллограф функции, которую блок задает к модели, которая содержит подсистему. Генератор кода производит функциональный код для func_calc и сопоставляет каждый вызов функции со специфичными для экземпляра данными. Данные включают состояния, такие как данные, хранимые в памяти.
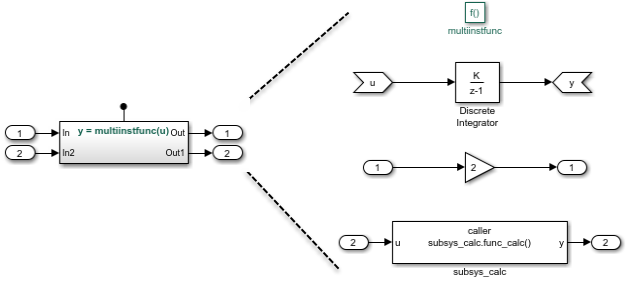
Функциональный блок Simulink, который задает функциональный multiinstfunc, использует блок Function Caller, чтобы вызвать функциональный func_calc. Тот Функциональный блок Simulink также показывает, что может взаимодействовать через интерфейс к сигналам в окружении блока через блоки Inport и Outport.
В верхнем уровне модели rtwdemo_comp подсистема вызова функций использует Функциональные блоки Вызывающей стороны, чтобы вызвать два экземпляра функционального multiinstfunc. Генератор кода производит функциональный код и сопоставляет каждый вызов со специфичными для экземпляра данными.
Сконфигурируйте Функциональные блоки Simulink путем установки параметров для функциональной Триггерной Блокировки порта. Для генератора кода, чтобы произвести повторно используемый код из Функциональных блоков Simulink:
Сконфигурируйте экземпляры блока с тем же именем функции.
Установите Function visibility на scoped.
В примере имя функции для Функциональных блоков Simulink в двух экземплярах model rtwdemo_func_dinteg, на который ссылаются, задано как multiinstfunc.
Сконфигурируйте Функциональные блоки Вызывающей стороны. Для каждого из блоков, набор параметры блоков Function prototype. Начните вводить прототип. Например, введите y. Моделируйте опции, на основе функциональных определений в модели, появитесь в списке выбора. Выберите прототип, который соответствует каждому вызову функции.
В данном примере прототипы сконфигурированы можно следующим образом:
В подсистеме вызова функций прототипы для функциональных вызывающих сторон сконфигурированы как y = Instance1.multiinstfunc(u) и y = Instance2.multiinstfunc(u). Префикс Instancen
Функциональная вызывающая сторона в функциональном multiinstfunc сконфигурирована с прототипом y = subsys_calc.func_calc(u). Префиксный subsys_calc идентифицирует подсистему, которая содержит функциональное определение.
Для примера спецификации аргумента ввода и вывода и шаг расчета сохраняют настройки по умолчанию.
Изменения конфигурации не требуются для подсистемы в модели в качестве примера. Когда вы включаете Функциональный блок Simulink в подсистему, генератор кода
Определяет объем функции к модели, которая включает подсистему.
Обрабатывает подсистему как атомарный модуль.
Сконфигурируйте модель, на которую ссылаются, которая включает Функциональный блок Simulink:
В диалоговом окне Block Parameters, набор Model name к образцовому имени файла, на которое ссылаются. В данном примере именем модели является rtwdemo_func_dinteg.slx.
Установите Number of model instances allowed на Multiple.
Чтобы сгенерировать интерфейс класса C++ для эталонной модели, установите Language на C++ и Code interface packaging к C++ class.
Опционально, можно настроить образцовые интерфейсы функции точки входа. Можно задать имена функций точки входа. Для выполнения (шаг) функционирует точка входа, можно сконфигурировать имя функции и аргументы. Пользовательские интерфейсы функции точки входа могут минимизировать изменения в существующем внешнем коде, который вы интегрируете со сгенерированным кодом. Пример использует функциональные интерфейсы по умолчанию. Смотрите Настраивают Интерфейсы Функции Точки входа для Simulink Функциональные и Функциональные Блоки Вызывающей стороны (Embedded Coder).
Сконфигурируйте топ-модель для компонента модели. Если вы хотите, чтобы компонент модели (то есть, топ-модель) был допускающим повторное использование, набор Code interface packaging к Reusable function. Если вы генерируете Код С++, можно установить этот параметр на C++ class. В любом случае, также:
Установите Multi-instance code error diagnostic на Error.
Установите Pass root-level I/O as на Part of model data structure.
Опционально, можно настроить образцовые интерфейсы функции точки входа. Можно задать имена функций точки входа. Для выполнения (шаг) функционирует точка входа, можно сконфигурировать имя функции и аргументы. Пользовательские интерфейсы функции точки входа могут минимизировать изменения в существующем внешнем коде, который вы интегрируете со сгенерированным кодом. Пример использует функциональные интерфейсы по умолчанию. Смотрите Настраивают Интерфейсы Функции Точки входа для Simulink Функциональные и Функциональные Блоки Вызывающей стороны (Embedded Coder).
Сгенерируйте код С для модели.
Функциональный код для мультиэкземпляра Функциональный блок Simulink
Когда вы помещаете ограниченный по объему Функциональный блок Simulink в модель, на которую ссылаются, которую вы используете многократно в другой модели, генератор кода помещает функциональный код в файл model.cmultiinstfunc в slprj/ert/rtwdemo_func_dinteg/rtwdemo_func_dinteg.c.
real_T rtwdemo_func_dinteg_multiinstfunc(RT_MODEL_rtwdemo_func_dinteg_T * const
rtwdemo_func_dinteg_M, const real_T rtu_u)
{
real_T rtb_TmpLatchAtInOutport1;
real_T rtb_TmpLatchAtIn2Outport1;
real_T rty_y_0;
rtb_TmpLatchAtInOutport1 =
*rtwdemo_func_dinteg_M->rtwdemo_func_dintegrtextInport.rtu_In1;
rtb_TmpLatchAtIn2Outport1 =
*rtwdemo_func_dinteg_M->rtwdemo_func_dintegrtextInport.rtu_In2;
*rtwdemo_func_dinteg_M->rtwdemo_func_dintegrtextOutport.rty_Out2 = 2.0 *
rtb_TmpLatchAtInOutport1;
rtwdemo_func_dinteg_func_calc(rtwdemo_func_dinteg_M, rtb_TmpLatchAtIn2Outport1,
rtwdemo_func_dinteg_M->rtwdemo_func_dintegrtextOutport.rty_Out1);
rty_y_0 = rtwdemo_func_dinteg_M->dwork.DiscreteIntegrator_DSTATE;
rtwdemo_func_dinteg_M->dwork.DiscreteIntegrator_DSTATE += 0.1 * rtu_u;
return rty_y_0;
}
Функциональный код для Функционального блока Simulink задан в подсистеме
Генератор кода помещает функциональный код для Функционального блока Simulink, который вы задаете в подсистеме в файле model.cfunc_calc в slprj/ert/rtwdemo_func_dinteg/rtwdemo_func_dinteg.c.
void rtwdemo_func_dinteg_func_calc(RT_MODEL_rtwdemo_func_dinteg_T * const
rtwdemo_func_dinteg_M, real_T rtu_u, real_T *rty_y)
{
rtwdemo_func_dinteg_M->dwork.calcMem =
rtwdemo_func_dinteg_M->dwork.UnitDelay_DSTATE;
*rty_y = rtwdemo_func_dinteg_M->dwork.UnitDelay_DSTATE;
rtwdemo_func_dinteg_M->dwork.UnitDelay_DSTATE = rtu_u * 0.07;
}
Структура, которая хранит данные мультиэкземпляра для допускающих повторное использование функций
Генератор кода использует структуру, подобную модели реального времени (RT_MODEL) структура данных, чтобы хранить данные мультиэкземпляра, сопоставленные с допускающей повторное использование функцией. Генератор кода задает структуру в slprj/ert/rtwdemo_func_dinteg/rtwdemo_func_dinteg.h.
typedef struct rtwdemo_func_dinteg_tag_RTM RT_MODEL_rtwdemo_func_dinteg_T;
Код инициализации для мультиэкземпляра модель, на которую ссылаются,
Для каждого экземпляра модели, на которую ссылаются, которая включает то же самое, определил объем Функционального блока Simulink, генератор кода производит код функции инициализации и запуска. Одна копия кода инициализации задана в slprj/ert/rtwdemo_func_dinteg/rtwdemo_func_dinteg.c.
void rtwdemo_func_dinteg_Start(RT_MODEL_rtwdemo_func_dinteg_T *const
rtwdemo_func_dinteg_M, const real_T *rtu_In1, const real_T *rtu_In2, real_T
*rty_Out2, real_T *rty_Out1)
{
rtwdemo_func_dinteg_M->rtwdemo_func_dintegrtextInport.rtu_In1 = rtu_In1;
rtwdemo_func_dinteg_M->rtwdemo_func_dintegrtextInport.rtu_In2 = rtu_In2;
rtwdemo_func_dinteg_M->rtwdemo_func_dintegrtextOutport.rty_Out2 = rty_Out2;
rtwdemo_func_dinteg_M->rtwdemo_func_dintegrtextOutport.rty_Out1 = rty_Out1;
}
void rtwdemo_func_dinteg_initialize(const char_T **rt_errorStatus,
RT_MODEL_rtwdemo_func_dinteg_T *const rtwdemo_func_dinteg_M)
{
{
rtmSetErrorStatusPointer(rtwdemo_func_dinteg_M, rt_errorStatus);
}
}
Код инициализации называется для каждого экземпляра модели, на которую ссылаются, которая содержит тот же Функциональный блок Simulink. Тот код находится в файле rtwdemo_comp.c в папке сборки.
. . . rtwdemo_func_dinteg_initialize(rtmGetErrorStatusPointer(rtwdemo_comp_M), (&(rtwdemo_comp_M->Instance1))); rtwdemo_func_dinteg_initialize(rtmGetErrorStatusPointer(rtwdemo_comp_M), (&(rtwdemo_comp_M->Instance2))); rtwdemo_func_dinteg_Start((&(rtwdemo_comp_M->Instance1)), &rtU->In2, &rtU->In3, &rtY->Out2, &rtY->Out3); rtwdemo_func_dinteg_Start((&(rtwdemo_comp_M->Instance2)), &rtU->In4, &rtU->In5, &rtY->Out4, &rtY->Out5); }
Объявления функции точки входа топ-модели
Образцовый заголовочный файл rtwdemo_comp.h включает объявления extern для топ-модели, инициализирует, останавливается, и выполнение (выполнение) функции точки входа.
extern void rtwdemo_comp_initialize(RT_MODEL_rtwdemo_comp_T *const rtwdemo_comp_M); extern void Run(RT_MODEL_rtwdemo_comp_T *const rtwdemo_comp_M);
Объявления функции точки входа эталонной модели
Заголовочный файл slprj/ert/rtwdemo_func_dinteg/rtwdemo_func_dinteg.h включает объявления extern для функций точки входа эталонной модели.
extern void rtwdemo_func_dinteg_initialize(const char_T **rt_errorStatus, RT_MODEL_rtwdemo_func_dinteg_T *const rtwdemo_func_dinteg_M); extern real_T rtwdemo_func_dinteg_multiinstfunc(RT_MODEL_rtwdemo_func_dinteg_T * const rtwdemo_func_dinteg_M, const real_T rtu_u); extern void rtwdemo_func_dinteg_Start(RT_MODEL_rtwdemo_func_dinteg_T *const rtwdemo_func_dinteg_M, const real_T *rtu_In1, const real_T *rtu_In2, real_T *rty_Out2, real_T *rty_Out1);
Сгенерируйте Код С++ для модели.
Функциональный код для мультиэкземпляра Функциональный блок Simulink
Когда вы помещаете ограниченный по объему Функциональный блок Simulink в модель, на которую ссылаются, которую вы используете многократно в другой модели, генератор кода помещает функциональный код в файл model.cppmultiinstfunc в slprj/ert/rtwdemo_func_dinteg/rtwdemo_func_dinteg_cpp.cpp.
real_T rtwdemo_func_dintegModelClass::multiinstfunc(const real_T rtu_u)
{
real_T rtb_TmpLatchAtInOutport1;
real_T rtb_TmpLatchAtIn2Outport1;
real_T rty_y_0;
rtb_TmpLatchAtInOutport1 = *rtwdemo_func_dinteg_cprtrtu_In1;
rtb_TmpLatchAtIn2Outport1 = *rtwdemo_func_dinteg_cprtrtu_In2;
*rtwdemo_func_dinteg_crtrty_Out2 = 2.0 * rtb_TmpLatchAtInOutport1;
rtwdemo_func_dinteg_c_func_calc(rtb_TmpLatchAtIn2Outport1,
rtwdemo_func_dinteg_crtrty_Out1);
rty_y_0 = rtwdemo_func_dinteg_cpprtDW.DiscreteIntegrator_DSTATE;
rtwdemo_func_dinteg_cpprtDW.DiscreteIntegrator_DSTATE += 0.1 * rtu_u;
return rty_y_0;
}Функциональный код для Функционального блока Simulink задан в подсистеме
Генератор кода помещает функциональный код для Функционального блока Simulink, который вы задаете в подсистеме в model.cppfunc_calc в slprj/ert/rtwdemo_func_dinteg/rtwdemo_func_dinteg_cpp.cpp.
void rtwdemo_func_dintegModelClass::rtwdemo_func_dinteg_c_func_calc(real_T rtu_u,
real_T *rty_y)
{
rtwdemo_func_dinteg_cpprtDW.calcMem =
rtwdemo_func_dinteg_cpprtDW.UnitDelay_DSTATE;
*rty_y = rtwdemo_func_dinteg_cpprtDW.UnitDelay_DSTATE;
rtwdemo_func_dinteg_cpprtDW.UnitDelay_DSTATE = rtu_u * 0.07;
}
Структура, которая хранит данные мультиэкземпляра для допускающих повторное использование функций
Генератор кода использует структуру, подобную модели реального времени (RT_MODEL) структура данных, чтобы хранить данные мультиэкземпляра, сопоставленные с Reusable function. Генератор кода задает структуру в slprj/ert/rtwdemo_func_dinteg/rtwdemo_func_dinteg_cpp.h.
typedef struct rtwdemo_func_dinteg_cpp_tag_RTM rtwdemo_func_dinteg_cp_RT_MODEL;
Код инициализации для мультиэкземпляра модель, на которую ссылаются,
Для каждого экземпляра модели, на которую ссылаются, которая включает то же самое, определил объем Функционального блока Simulink, генератор кода производит код функции инициализации и запуска. Одна копия кода инициализации задана в slprj/ert/rtwdemo_func_dinteg/rtwdemo_func_dinteg_cpp.cpp.
void rtwdemo_func_dintegModelClass::start(real_T *rtu_In1, real_T *rtu_In2,
real_T *rty_Out2, real_T *rty_Out1)
{
rtwdemo_func_dinteg_cprtrtu_In1 = rtu_In1;
rtwdemo_func_dinteg_cprtrtu_In2 = rtu_In2;
rtwdemo_func_dinteg_crtrty_Out2 = rty_Out2;
rtwdemo_func_dinteg_crtrty_Out1 = rty_Out1;
}
.
.
.
void rtwdemo_func_dintegModelClass::initializeRTM()
{
(void) memset((void *)((&rtwdemo_func_dinteg_cpprtM)), 0,
sizeof(rtwdemo_func_dinteg_cp_RT_MODEL));
}
Код инициализации называется для каждого экземпляра модели, на которую ссылаются, которая содержит тот же Функциональный блок Simulink. Тот код находится в файле rtwdemo_comp_cpp.cpp в папке сборки.
. . . Instance1MDLOBJ0.initializeRTM(); Instance1MDLOBJ0.setErrorStatusPointer(rtmGetErrorStatusPointer((&rtM))); Instance1MDLOBJ0.initialize(); Instance2MDLOBJ1.initializeRTM(); Instance2MDLOBJ1.setErrorStatusPointer(rtmGetErrorStatusPointer((&rtM))); Instance1MDLOBJ0.start(&rtU.In2, &rtU.In3, &rtY.Out2, &rtY.Out3); Instance2MDLOBJ1.start(&rtwU.In4, &rtwU.In5, &rtY.Out4, &rtY.Out5); }
Объявление класса топ-модели
Образцовый заголовочный файл rtwdemo_comp_cpp.h включает объявление класса для топ-модели.
class rtwdemo_compModelClass {
public:
ExtU rtU;
ExtY rtY;
void initialize();
void Run();
rtwdemo_compModelClass();
~rtwdemo_compModelClass();
RT_MODEL * getRTM();
private:
RT_MODEL rtM;
rtwdemo_func_dintegModelClass Instance1MDLOBJ0;
rtwdemo_func_dintegModelClass Instance2MDLOBJ1;
};
Объявление класса эталонной модели
Заголовочный файл slprj/ert/rtwdemo_func_dinteg/rtwdemo_func_dinteg_cpp.h включает объявление класса для эталонной модели.
class rtwdemo_func_dintegModelClass {
public:
real_T multiinstfunc(const real_T rtu_u);
void start(real_T *rtu_In1, real_T *rtu_In2, real_T *rty_Out2, real_T
*rty_Out1);
rtwdemo_func_dintegModelClass();
~rtwdemo_func_dintegModelClass();
rtwdemo_func_dinteg_cp_RT_MODEL * getRTM();
void initializeRTM();
void setErrorStatusPointer(const char_T **rt_errorStatus);
private:
rtwdemo_func_dinteg_cpp_DW rtwdemo_func_dinteg_cpprtDW;
const real_T *rtwdemo_func_dinteg_cprtrtu_In1;
const real_T *rtwdemo_func_dinteg_cprtrtu_In2;
real_T *rtwdemo_func_dinteg_crtrty_Out2;
real_T *rtwdemo_func_dinteg_crtrty_Out1;
rtwdemo_func_dinteg_cp_RT_MODEL rtwdemo_func_dinteg_cpprtM;
void rtwdemo_func_dinteg_c_func_calc(real_T rtu_u, real_T *rty_y);
};Эти ограничения генерации кода применяются к моделям экспорта функций, которые включают несколько экземпляров Функционального блока Simulink.
Необходимо установить образцовый параметр конфигурации Pass root-level I/O as на Part of model data structure.
Сгенерированный код совместим с однопоточным выполнением только. Чтобы избежать условий состязания для разделяемых данных сигнала, вызовите экземпляры функционального кода от того же потока выполнения.
Вы не можете:
Сгенерируйте код, если модель экспорта функций включает образцовые варианты.
Вызовите сгенерированный код из графика Stateflow®.
Включите интерфейс обмена данными режима external mode.
