В этом примере показано, как сравнить несколько ответов контроллера с помощью MPC Designer. В частности, контроллеры с различными выходными ограничительными настройками сравнены.
Создайте модель в пространстве состояний своего объекта и задайте типы сигнала MPC.
A = [-0.0285 -0.0014; -0.0371 -0.1476]; B = [-0.0850 0.0238; 0.0802 0.4462]; C = [0 1; 1 0]; D = zeros(2,2); plant = ss(A,B,C,D); plant = setmpcsignals(plant,'MV',1,'UD',2,'MO',1,'UO',2);
Откройте MPC Designer и импортируйте модель объекта управления.
mpcDesigner(plant)
Приложение добавляет заданный объект в Data Browser наряду с контроллером по умолчанию, mpc1, и сценарий симуляции по умолчанию, scenario1.
Сконфигурируйте сценарий симуляции подавления помех.
В MPC Designer, на вкладке MPC Designer, нажимают Edit Scenario> scenario1.
В диалоговом окне Simulation Scenario задайте Simulation duration 40 секунд.
В таблице Reference Signals, в Signal выпадающие списки, выбирают Constant содержать заданные значения обоих выходных параметров по их номинальной стоимости.
В таблице Unmeasured Disturbances, в Signal выпадающий список, выбирают Step. Используйте Time по умолчанию и значения Step.
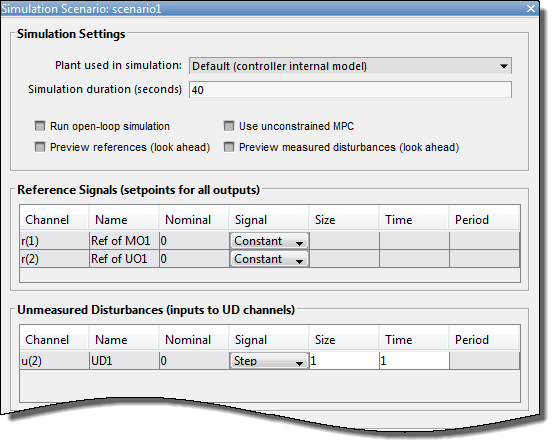
Этот сценарий симулирует модульное ступенчатое изменение в неизмеренном входном воздействии во время 1 секунды.
Нажмите OK.
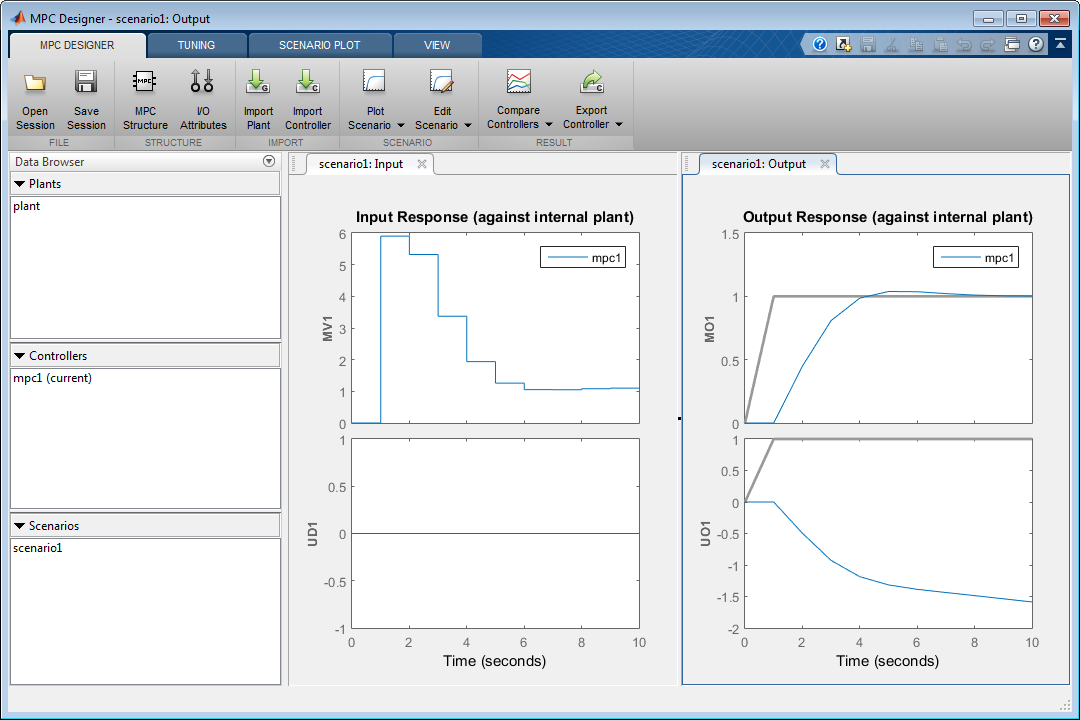
Выполнение приложения обновленный сценарий симуляции и обновления графики отклика контроллера. В графиках Output Response контроллер по умолчанию возвращает измеренный выходной параметр, MO1, к его номинальной стоимости, однако действие управления вызывает увеличение неизмеренного выхода, UO1.
Предположим, что спецификации управления указывают, что такое увеличение неизмеренного воздействия является нежелательным. Чтобы ограничить эффект неизмеренного воздействия, создайте контроллер с трудным выходным ограничением.
На практике использование трудных выходных ограничений не рекомендуется. Такие ограничения могут создать неосуществимую задачу оптимизации, когда перемещения выходной переменной за пределами ограничения ограничивают из-за воздействия.
В Data Browser, в разделе Controllers, щелкают правой кнопкой по mpc1, и выберите Copy.
Приложение создает копию контроллера по умолчанию и добавляет его в Data Browser.
Дважды кликните каждый контроллер и переименуйте их можно следующим образом.

Щелкните правой кнопкой по mpcHard контроллер, и выбирает Tune (make current). Приложение добавляет mpcHard ответ контроллера на Input Response и графики Output Response.
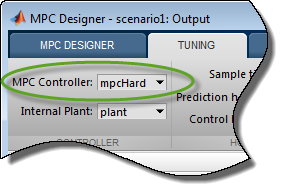
На вкладке Tuning, в разделе Controller, mpcHard выбран как текущий настраиваемый MPC Controller.
В разделе Design нажмите Constraints.
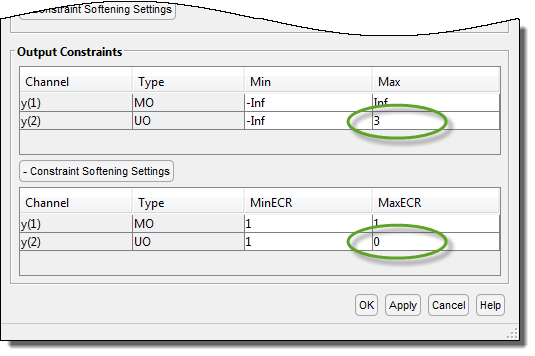
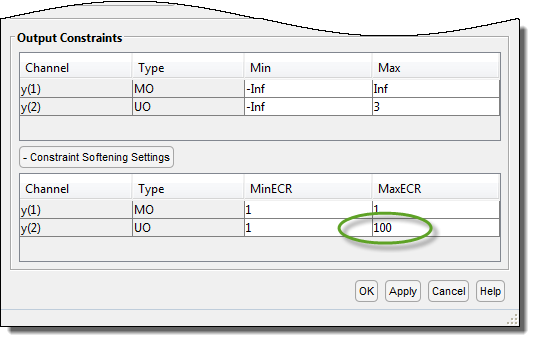
В диалоговом окне Constraints, в разделе Output Constraints, в столбце Max, задают максимальное выходное ограничение 3 для неизмеренного выхода (UO).
По умолчанию все выходные ограничения являются мягкими, который является контроллером, может позволить нарушения ограничения при вычислении перемещений оптимального управления.
Чтобы сделать неизмеренное выходное ограничение трудно, нажмите Constraint Softening Settings и введите значение MaxECR 0 для UO. Эта установка устанавливает строгую границу контроллера выход, который не может быть нарушен.
Нажмите OK.

Графики отклика обновляются, чтобы отразить новый mpcHard настройка. В графике Output Response, в графике UO1, mpcHard ответ ограничивается максимумом 3. Как компромисс, контроллер не может возвратить ответ MO1 на его номинальную стоимость.
Если легенды графика блокируют сигналы ответа, можно перетащить легенды в другие места.
Предположим, что отклонение MO1 от его номинальной стоимости является слишком большим. Можно смягчить выходное ограничение для компромисса между двумя целями управления: MO1 отслеживание выхода и ограничительная удовлетворенность UO1.
На вкладке Tuning, в разделе Analysis, нажимают Store Controller, чтобы сохранить копию mpcHard в Data Browser.
В Data Browser, в разделе Controllers, переименовывают mpcHard_Copy к mpcSoft.
На вкладке Tuning, в разделе Controller, в MPC Controller выпадающий список, выбирают mpcSoft как текущий контроллер.
Приложение добавляет mpcSoft ответ контроллера на Input Response и графики Output Response.
В разделе Design нажмите Constraints.
В диалоговом окне Constraints, в разделе Output Constraints, вводят значение MaxECR 100 для UO, чтобы смягчить ограничение.
Нажмите OK.

Графики отклика обновляются, чтобы отразить новый mpcSoft настройка. В графике Output Response, mpcSoft показывает компромисс между предыдущими ответами контроллера.
Чтобы сравнить два принужденных контроллера только, можно удалить неограниченный контроллер по умолчанию из графиков отклика ввода и вывода.
На вкладке MPC Designer, в разделе Result, нажимают Compare Controllers> mpcNone.
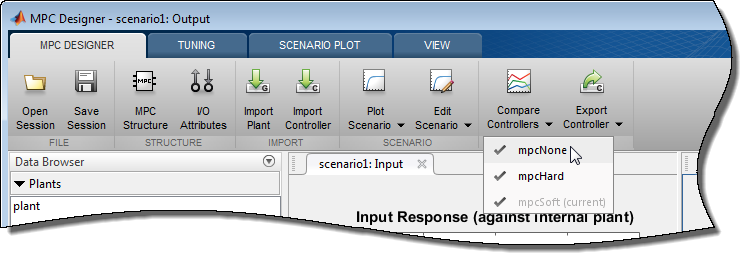
Приложение удаляет mpcNone ответы от Input Response и графиков Output Response.

Можно переключить отображение любого контроллера в Data Browser за исключением контроллера, в настоящее время настраиваемого. Под Compare Controllers контроллеры с отображенными ответами обозначаются с галочками.
