Обобщенный компенсатор бокового лепестка
Phased Array System Toolbox / Beamforming
![]()
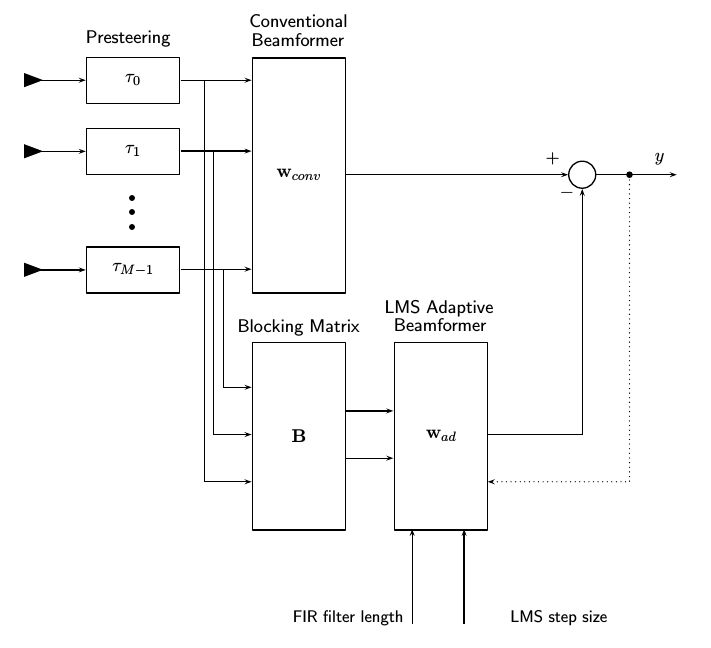
Блок GSC Beamformer реализует формирователь луча обобщенной отмены бокового лепестка (GSC). Формирователь луча GSC разделяет входящие сигналы массивов и отправляет их через обычный путь к формирователю луча и путь к отмене бокового лепестка. Алгоритм сначала предварительно регулирует массив к beamforming направлению и затем адаптивно выбирает веса фильтра, чтобы минимизировать степень при выходе пути к отмене бокового лепестка. Алгоритм использует наименьшее количество средних квадратичных (LMS), чтобы вычислить адаптивные веса. Финал beamformed сигнал является различием между выходными параметрами этих двух путей.
Signal path FIR filter length — Длина КИХ фильтрует вдоль пути прохождения сигналаДлина КИХ-фильтра пути прохождения сигнала, заданного как положительное целое число. КИХ-фильтр является функцией дельты.
Adaptive filter step size — LMS адаптивный фактор размера шага фильтраАдаптивный фактор размера шага фильтра, заданный как положительная скалярная величина. Это количество, когда разделено на общую степень в пути к отмене бокового лепестка, определяет фактический адаптивный размер шага фильтра, используемый LMS-алгоритмом.
Beamforming direction (deg) — Направления BeamformingНаправления Beamforming, заданные как 2-by-L матрица с действительным знаком, где L является количеством beamforming направлений. Каждый столбец принимает форму [AzimuthAngle;ElevationAngle]. Угловые модули в градусах. Угол азимута должен находиться между-180 ° и 180 °. Угол вертикального изменения должен находиться между-90 ° и 90 °. Углы заданы относительно системы локальной координаты массива.
Чтобы включить этот параметр, установите параметр Source of beamforming direction на Property.
Source of beamforming direction — Источник beamforming направленияProperty (значение по умолчанию) | Input portИсточник beamforming направления, заданного как Property или Input port. Когда вы устанавливаете Source of beamforming direction на Property, вы затем устанавливаете направление с помощью параметра Beamforming direction (deg). Когда вы выбираете Input port, направление определяется входом к Ang порт.
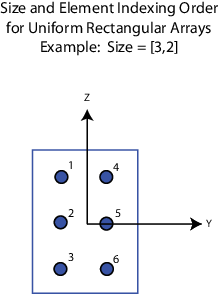
Размерности массива URA, заданного как положительное целое число или 1 2 вектор положительных целых чисел.
Если Array size 1 2 вектор, вектор имеет форму [NumberOfArrayRows,NumberOfArrayColumns].
Если Array size является целым числом, массив имеет то же число элементов в каждой строке и столбце.
Для URA элементы массива индексируются сверху донизу вдоль крайнего левого столбца массивов и продолжаются к следующим столбцам слева направо. В этом рисунке, значении Array size [3,2] создает массив, имеющий три строки и два столбца.
Чтобы включить этот параметр, установите Geometry на URA.
generalized sidelobe canceller (GSC) является эффективным внедрением linear constraint minimum variance (LCMV) формирователь луча. LCMV beamforming минимизирует выходную мощность массива при сохранении степени в одном или нескольких заданных направлениях. Этот тип формирователя луча называется ограниченным формирователем луча. Можно вычислить точные веса для ограниченного формирователя луча, но расчет является дорогостоящим, когда число элементов является большим. Расчет требует инверсии большой пространственной ковариационной матрицы. Формулировка GSC преобразует адаптивную ограниченную оптимизацию проблема LCMV в адаптивную неограниченную проблему, которая упрощает реализацию.
В алгоритме GSC входящие данные о датчике разделены в два пути прохождения сигнала как показано в блок-схеме. Верхний путь является обычным формирователем луча. Более низкий путь является адаптивным неограниченным формирователем луча, цель которого состоит в том, чтобы минимизировать выходную мощность GSC. Алгоритм GSC состоит из этих шагов:
Предварительно регулируйте данные о датчике элемента сдвигом времени входящие сигналы. Предварительное регулирование времени - выравнивает все сигналы элемента датчика. Временные сдвиги зависят от угла падения сигнала.
Передайте предварительно управляемые сигналы через верхний путь в обычный формирователь луча с фиксированными весами, wconv.
Также передайте предварительно управляемые сигналы через более низкий путь в блокирующуюся матрицу, B. Блокирующаяся матрица является ортогональной к сигналу и удаляет сигнал из более низкого пути.
Пропустите более низкие сигналы пути через банк КИХ-фильтров. FilterLength наборы свойств длина фильтров. Коэффициенты фильтра являются адаптивными весами фильтра, wad.
Вычислите различие между верхними и более низкими путями прохождения сигнала. Этим различием является beamformed GSC выход.
Питайте beamformed выходом назад в фильтр. Адаптируйте веса фильтра с помощью алгоритма наименьшее количество среднего квадратичного (LMS). Адаптивный размер шага LMS является количеством, установленным LMSStepSizeFactor свойство, разделенное на общую степень сигнала.