Оцените целевое направление от каналов различия и суммы
Phased Array System Toolbox / Направление Прибытия
![]()
Monopulse Estimator оценивает направление прибытия узкополосного сигнала на основе исходного предположения путем применения амплитудной обработки моноимпульса на сумму и сигналы канала различия, полученные массивом. Можно создать эти каналы с помощью блока Monopulse Feed.
SIGMA — Сигнал канала суммыСигнал канала суммы, заданный как N с комплексным знаком-by-1 вектор-столбец. N является количеством снимков состояния в сигнале.
Типы данных: double
Поддержка комплексного числа: Да
DeltaAz — Сигнал канала различия азимутаСигнал канала различия азимута, заданный как N с комплексным знаком-by-1 вектор-столбец. N является количеством снимков состояния в сигнале.
Типы данных: double
Поддержка комплексного числа: Да
DeltaEl — Сигнал канала различия вертикального измененияСигнал канала различия вертикального изменения, заданный как N с комплексным знаком-by-1 вектор-столбец. N является количеством снимков состояния в сигнале.
Чтобы включить этот выходной порт, установите параметр Monopulse coverage на 3D.
Типы данных: double
Поддержка комплексного числа: Да
STEER — Руководящее направление массивовРуководящее направление массивов, заданное как скаляр или с действительным знаком 2 1 вектор-столбец.
Когда вы устанавливаете параметр Monopulse coverage на Azimuth, держащееся направление является скаляром и представляет руководящий угол азимута.
Когда вы устанавливаете параметр Monopulse coverage на 3D, держащийся вектор направления имеет форму [azimuthAngle; elevationAngle], где azimuthAngle руководящий угол азимута и elevationAngle руководящий угол вертикального изменения.
Модули в градусах. Углы азимута находятся между-180 ° и 180 °, включительно, и углы вертикального изменения находятся между-90 ° и 90 °, включительно.
Пример: [40;10]
Типы данных: double
Az — Предполагаемое направление азимута целиПредполагаемое направление азимута цели, возвращенной как 1 с действительным знаком N. Векторные элементы содержат предполагаемый целевой угол азимута направления в каждом снимке состояния сигнала. Модули в градусах.
Чтобы включить этот выходной порт, установите Monopulse coverage на Azimuth и OutputFormat к Angle.
Типы данных: double
dAz — Предполагаемое смещение направления азимута целиПредполагаемое смещение направления азимута цели, возвращенной как 1 с действительным знаком N вектором. Векторные элементы содержат смещение предполагаемого целевого угла азимута направления от руководящего направления азимута в каждом снимке состояния сигнала. Модули в градусах.
Чтобы включить этот выходной порт, установите Monopulse coverage на Azimuth и OutputFormat к Angle offset.
Типы данных: double
AzEl — Предполагаемое направление целиПредполагаемое направление цели, возвращенной как 2 с действительным знаком N матрицей. Каждый столбец содержит предполагаемое целевое направление в форме [azimuthAngle; elevationAngle] , где azimuthAngle предполагаемый угол азимута и elevationAngle оцененный угол вертикального изменения. Модули в градусах.
Чтобы включить этот выходной порт, установите Monopulse coverage на 3D и OutputFormat к Angle.
Типы данных: double
dAzEl — Предполагаемое смещение направления целиПредполагаемое смещение направления цели, возвращенной как 2 с действительным знаком N матрицей. Смещение является различием между целевым направлением и держащимся вектором. Каждый столбец содержит предполагаемое смещение целевого направления в форме [dazimuthAngle; delevationAngle], где dazimuthAngle предполагаемое угловое смещение азимута и delevationAngle оцененное угловое смещение вертикального изменения. Модули в градусах.
Чтобы включить этот выходной порт, установите Monopulse coverage на 3D и OutputFormat к Angle offset.
Типы данных: double
AzRatio — Отношение суммы и каналов различия в азимутеОтношение суммы и каналов различия в азимуте, возвращенных как 1 с действительным знаком N вектором. Элементы содержат отношение суммы к каналу различия в азимуте в каждом снимке состояния сигнала.
Чтобы включить этот выходной порт, установите Monopulse coverage на Azimuth и установите флажок Output sum difference ratio.
Типы данных: double
AzElRatio — Отношение суммы образовывает канал к азимуту и каналам различия в вертикальном измененииОтношение суммы и азимута и каналов различия в вертикальном изменении, возвращенных как 2 с действительным знаком N матрицей. Элементы первой строки содержат отношение суммы к каналу различия в азимуте в каждом снимке состояния сигнала. Элементы второй строки содержат отношение суммы к каналу различия в вертикальном изменении в каждом снимке состояния сигнала.
Чтобы включить этот выходной порт, установите Monopulse coverage на 3D и установите флажок Output sum difference ratio.
Типы данных: double
Signal propagation speed (m/s) — Скорость распространения сигналаphysconst('LightSpeed') (значение по умолчанию) | положительная скалярная величина с действительным знакомСкорость распространения сигнала, заданная как положительная скалярная величина с действительным знаком. Значением по умолчанию скорости света является значение, возвращенное physconst('LightSpeed'). Модули исчисляются в метрах в секунду.
Пример: 3e8
Типы данных: double
Operating frequency (Hz) — Система рабочая частота3.0e8 (значение по умолчанию) | положительный действительный скалярСистема рабочая частота, заданная как положительная скалярная величина. Модули находятся в Гц.
Monopulse coverage — Моноимпульсные направления покрытия3D (значение по умолчанию) | AzimuthМоноимпульсные направления покрытия, заданные как 3D или Azimuth. Когда вы устанавливаете этот параметр на 3D, моноимпульсное средство оценки использует канал суммы и и азимут и каналы различия в вертикальном изменении. Когда вы устанавливаете этот параметр на Azimuth, моноимпульсное средство оценки использует канал суммы и канал различия в азимуте.
Squint angle (degrees) — Косой уголКосой угол, заданный как скаляр или с действительным знаком 2 1 вектор. Косой угол является разделительным углом между лучом суммы и лучами вдоль направлений вертикального изменения и азимута.
Когда вы устанавливаете Monopulse coverage параметр к Azimuth, установите Squint angle параметр к скаляру.
Когда вы устанавливаете Monopulse coverage параметр к 3D, можно задать косой угол или как скаляр или как вектор. Если вы устанавливаете Squint angle параметр к скаляру, косой угол является тем же самым и вдоль азимута и вдоль направлений вертикального изменения. Если вы устанавливаете Squint angle параметр к 2 1 вектору, его элементы задают косой угол вдоль направлений вертикального изменения и азимута.
Пример: [20;5]
Output format — Выведите формат направленияAngle (значение по умолчанию) | Angle offsetФормат направления выход, заданный Angle или Angle offset. Когда вы устанавливаете этот параметр на Angle, выходной порт помечен AzEl или Az и фактическое направление цели. Когда вы устанавливаете это свойство на Angle offset, выходной порт помечен dAzEl или dAz и угловое смещение цели от руководящего направления массивов.
Output sum difference ratio — Включите выходной порт отношения различия суммыoff (значение по умолчанию) | onУстановите этот флажок, чтобы вывести отношение суммы и каналов различия в направлениях вертикального изменения и азимуте. Когда вы устанавливаете Monopulse coverage на Azimuth, блок выводит отношение различия азимута суммы с помощью AzRatio порт. Когда вы устанавливаете Monopulse coverage на 3D, блок выводит различие азимута суммы и отношение каналов различия вертикального изменения суммы с помощью AzElRatio порт.
Generate Monopulse Feed — Создайте моноимпульсный блок каналаНажмите эту кнопку, чтобы создать блок Monopulse Feed на основе параметров в этом блоке.
Simulate using — Блокируйте метод симуляцииInterpreted Execution (значение по умолчанию) | Code GenerationБлокируйте симуляцию, заданную как Interpreted Execution или Code Generation. Если вы хотите, чтобы ваш блок использовал интерпретатор MATLAB®, выбрал Interpreted Execution. Если вы хотите, чтобы ваш блок запустился как скомпилированный код, выбрал Code Generation. Скомпилированный код требует, чтобы время скомпилировало, но обычно запускается быстрее.
Интерпретированное выполнение полезно, когда вы разрабатываете и настраиваете модель. Блок запускает базовую Систему object™ в MATLAB. Можно изменить и выполнить модель быстро. Когда вы удовлетворены своими результатами, можно затем запустить блок с помощью Code Generation. Долгие симуляции, запущенные быстрее со сгенерированным кодом, чем в интерпретированном выполнении. Можно запустить повторенное выполнение без перекомпиляции, но если вы изменяете какие-либо параметры блоков, затем блок автоматически перекомпилировал перед выполнением.
Эта таблица показывает, как параметр Simulate using влияет на полное поведение симуляции.
Когда модель Simulink® находится в Accelerator режим, блочный режим, заданный с помощью Simulate using, заменяет режим симуляции.
Ускоряющие режимы
| Блокируйте симуляцию | Поведение симуляции | ||
Normal | Accelerator | Rapid Accelerator | |
Interpreted Execution | Блок выполняет использование интерпретатора MATLAB. | Блок выполняет использование интерпретатора MATLAB. | Создает независимый исполняемый файл из модели. |
Code Generation | Блок скомпилирован. | Все блоки в модели скомпилированы. | |
Для получения дополнительной информации смотрите Выбор Simulation Mode (Simulink).
Specify sensor array as — Метод, чтобы задать массивArray (no subarrays) (значение по умолчанию) | Partitioned array | Replicated subarray | MATLAB expressionМетод, чтобы задать массив, заданный как Array (no subarrays) или MATLAB expression.
Array (no subarrays) — используйте параметры блоков, чтобы задать массив.
Partitioned array — используйте параметры блоков, чтобы задать массив.
Replicated subarray — используйте параметры блоков, чтобы задать массив.
MATLAB expression — создайте массив с помощью выражения MATLAB.
Expression — Выражение MATLAB раньше создавало массивВыражение MATLAB раньше создавало массив, заданный как допустимый Системный объект Phased Array System Toolbox массивов.
Пример: phased.URA('Size',[5,3])
Чтобы включить этот параметр, установите Specify sensor array as на MATLAB expression.
Element type — Типы элемента массиваIsotropic Antenna (значение по умолчанию) | Cosine Antenna | Custom Antenna | Omni Microphone | Custom MicrophoneАнтенна или тип микрофона, заданный как одно из следующего:
Isotropic Antenna
Cosine Antenna
Custom Antenna
Omni Microphone
Custom Microphone
Operating frequency range (Hz) — Работа частотным диапазоном антенны или элемента микрофона[0,1.0e20] (значение по умолчанию) | с действительным знаком 1 2 вектор-строкаЗадайте операционный частотный диапазон антенны или элемента микрофона как 1 2 вектор-строка в форме [LowerBound,UpperBound]. Элемент не имеет никакого ответа вне этого частотного диапазона. Единицы частоты находятся в Гц.
Чтобы включить этот параметр, установите Element type на Isotropic Antenna, Cosine Antenna, или Omni Microphone.
Operating frequency vector (Hz) — Работа частотным диапазоном пользовательской антенны или элементов микрофона[0,1.0e20] (значение по умолчанию) | вектор-строка с действительным знакомЗадайте частоты, на которых можно установить антенну и частотные характеристики микрофона как 1 L вектором-строкой из увеличения действительных значений. Элемент антенны или микрофона не имеет никакого ответа вне частотного диапазона, заданного минимальными и максимальными элементами этого вектора. Единицы частоты находятся в Гц.
Чтобы включить этот параметр, установите Element type на Custom Antenna или Custom Microphone. Используйте Frequency responses (dB), чтобы установить ответы на этих частотах.
Baffle the back of the element — Задержите ответ Isotropic Antenna элемент или Omni Microphone элемент, чтобы обнулитьУстановите этот флажок, чтобы экранировать заднего ответа элемента. Когда назад экранированный, ответы под всеми углами азимута вне ±90 ° от разворота обнуляются. Поперечное направление задано как угол азимута на 0 ° и угол вертикального изменения на 0 °.
Чтобы включить этот флажок, установите Element type на Isotropic Antenna или Omni Microphone.
Exponent of cosine pattern — Экспоненты азимута и шаблонов косинуса вертикального измененияЗадайте экспоненты шаблона косинуса как неотрицательный скаляр или с действительным знаком 1 2 матрица неотрицательных значений. Когда Exponent of cosine pattern 1 2 вектор, первый элемент является экспонентой в направлении азимута, и второй элемент является экспонентой в направлении вертикального изменения. Когда вы устанавливаете этот параметр на скаляр, и направление азимута и шаблоны направляющего косинуса вертикального изменения повышены до той же степени.
Чтобы включить этот параметр, установите Element type на Cosine Antenna.
Frequency responses (dB) — Антенна и частотная характеристика микрофонаЧастотная характеристика пользовательской антенны или пользовательского микрофона для частот задана параметром Operating frequency vector (Hz). Размерности Frequency responses (dB) должны совпадать с размерностями вектора, заданного параметром Operating frequency vector (Hz).
Чтобы включить этот параметр, установите Element type на Custom Antenna или Custom Microphone.
Azimuth angles (deg) — Углы азимута диаграммы направленности антенн Задайте углы азимута, под которыми можно вычислить диаграмму направленности антенн как 1 P вектором-строкой. P должен быть больше 2. Углы азимута должны находиться между-180 ° и 180 °, включительно, и быть в строго увеличивающемся порядке.
Чтобы включить этот параметр, установите Element type на Custom Antenna.
Elevation angles (deg) — Углы вертикального изменения диаграммы направленности антеннЗадайте углы вертикального изменения, под которыми можно вычислить диаграмму направленности как 1 Q вектором. Q должен быть больше 2. Угловые модули в градусах. Углы вертикального изменения должны находиться между-90 ° и 90 °, включительно, и быть в строго увеличивающемся порядке.
Чтобы включить этот параметр, установите Element type на Custom Antenna.
Magnitude pattern (dB) — Величина объединенной диаграммы направленности антеннzeros(181,361) (значение по умолчанию) | Q с действительным знаком-by-P матрица | Q с действительным знаком-by-P-by-L массивВеличина объединенной диаграммы направленности антенн, заданной как Q-by-P матрица или Q-by-P-by-L массив. Количество Q равняется длине вектора, заданного Elevation angles (deg). Количество P равняется длине вектора, заданного Azimuth angles (deg). Количество L равняется длине Operating frequency vector (Hz).
Если этим параметром является Q-by-P матрица, тот же шаблон применяется ко всем частотам, заданным в параметре Operating frequency vector (Hz).
Если значением является Q-by-P-by-L массив, каждый Q-by-P страница массива задает шаблон для соответствующей частоты, заданной в параметре Operating frequency vector (Hz).
Чтобы включить этот параметр, установите Element type на Custom Antenna.
Phase pattern (deg) — Пользовательский шаблон фазы излучения антенныzeros(181,361) (значение по умолчанию) | Q с действительным знаком-by-P матрица | Q с действительным знаком-by-P-by-L массивФаза объединенной диаграммы направленности антенн, заданной как Q-by-P матрица или Q-by-P-by-L массив. Количество Q равняется длине вектора, заданного Elevation angles (deg). Количество P равняется длине вектора, заданного Azimuth angles (deg). Количество L равняется длине Operating frequency vector (Hz).
Если этим параметром является Q-by-P матрица, тот же шаблон применяется ко всем частотам, заданным в параметре Operating frequency vector (Hz).
Если значением является Q-by-P-by-L массив, каждый Q-by-P страница массива задает шаблон для соответствующей частоты, заданной в параметре Operating frequency vector (Hz).
Чтобы включить этот параметр, установите Element type на Custom Antenna.
Polar pattern frequencies (Hz) — Полярные частоты ответа микрофона шаблонаПолярные частоты ответа микрофона шаблона, заданные как действительный скаляр или с действительным знаком, 1 L вектором. Частоты ответа лежат в частотном диапазоне, заданном вектором Operating frequency vector (Hz).
Чтобы включить этот параметр, установите набор Element type на Custom Microphone.
Polar pattern angles (deg) — Полярные углы ответа шаблонаЗадайте полярные углы ответа шаблона как 1 P вектором. Углы измеряются от центральной оси погрузки микрофона и должны быть между-180 ° и 180 °, включительно.
Чтобы включить этот параметр, установите Element type на Custom Microphone.
Polar pattern (dB) — Пользовательский микрофон полярный ответzeros(1,361) (значение по умолчанию) | L с действительным знаком-by-P матрицаЗадайте величину пользовательского элемента микрофона полярные шаблоны как L-by-P матрица. L является количеством частот, заданных в Polar pattern frequencies (Hz). P является количеством углов, заданных в Polar pattern angles (deg). Каждая строка матрицы представляет величину полярного шаблона, измеренного на соответствующей частоте, заданной в Polar pattern frequencies (Hz) и всех углах, заданных в Polar pattern angles (deg). Шаблон измеряется в плоскости азимута. В плоскости азимута угол вертикального изменения составляет 0 °, и центральная ось погрузки является азимутом степеней на 0 ° и вертикальным изменением степеней на 0 °. Полярный шаблон симметричен вокруг центральной оси. Можно создать шаблон ответа микрофона на 3-D пробеле от полярного шаблона.
Чтобы включить этот параметр, установите Element type на Custom Microphone.
Geometry — Геометрия массивовULA (значение по умолчанию) | URA | UCA | Conformal ArrayГеометрия массивов, заданная как один из
ULA — Универсальная линейная матрица
URA — Универсальный прямоугольный массив
UCA — Универсальный круговой массив
Conformal Array — произвольные положения элемента
Number of elements — Количество элементов массива5 для массивов UCA (значение по умолчанию) | целое число, больше, чем или равный 2Количество элементов массива для ULA или массивов UCA, заданных как целое число, больше, чем или равный 2.
Когда вы устанавливаете Specify sensor array as на Replicated subarray, этот параметр применяется к каждому подмассиву.
Чтобы включить этот параметр, установите Geometry на ULA или UCA.
Element spacing (m) — Интервал между элементами массива[0.5,0.5] для массивов URA (значение по умолчанию) | положительная скалярная величина для ULA или массивов URA | вектор с 2 элементами положительных значений для массивов URAРазрядка между смежными элементами массива:
ULA — задайте интервал между двумя смежными элементами в массиве как положительная скалярная величина.
URA — задайте интервал как положительную скалярную величину или 1 2 вектор положительных значений. Если Element spacing (m) является скаляром, интервалы строки и столбца равны. Если Element spacing (m) является вектором, вектор имеет форму [SpacingBetweenArrayRows,SpacingBetweenArrayColumns].
Когда вы устанавливаете Specify sensor array as на Replicated subarray, этот параметр применяется к каждому подмассиву.
Чтобы включить этот параметр, установите Geometry на ULA или URA.
Array axis — Линейное направление оси ULAy (значение по умолчанию) | x | zЛинейное направление оси ULA, заданного как yX, или z. Все элементы массива ULA расположены равными интервалами вдоль этой оси в системе координат локального массива.
Чтобы включить этот параметр, установите Geometry на ULA.
Этот параметр также включен, когда блок только поддерживает массивы ULA.
Array size — Размерности массива URAРазмерности массива URA, заданного как положительное целое число или 1 2 вектор положительных целых чисел.
Если Array size 1 2 вектор, вектор имеет форму [NumberOfArrayRows,NumberOfArrayColumns].
Если Array size является целым числом, массив имеет одинаковое число строк и столбцы.
Когда вы устанавливаете Specify sensor array as на Replicated subarray, этот параметр применяется к каждому подмассиву.
Для URA элементы массива индексируются сверху донизу вдоль крайнего левого столбца, и затем продолжаются к следующим столбцам слева направо. В этом рисунке, значении Array size [3,2] создает массив, имеющий три строки и два столбца.
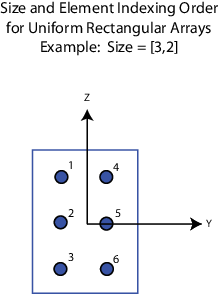
Чтобы включить этот параметр, установите Geometry на URA.
Element lattice — Решетка положений элемента URARectangular (значение по умолчанию) | TriangularРешетка положений элемента URA, заданных как Rectangular или Triangular.
Rectangular — Выравнивает все элементы последовательно и направления столбца.
Triangular — Переключает элементы ровной строки прямоугольной решетки к положительному направлению оси строки. Смещение является половиной интервала элемента по измерению строки.
Чтобы включить этот параметр, установите Geometry на URA.
Array normal — Массив нормальное направлениеx для массивов URA или z для массивов UCA (значение по умолчанию) | yМассив нормальное направление, заданное как xY, или z.
Элементы плоских массивов лежат в плоскости, ортогональной к выбранному массиву нормальное направление. Направления опорного направления элемента указывают вдоль массива нормальное направление.
| Массив нормальное значение параметров | Положения элемента и направления опорного направления |
|---|---|
x | Элементы массива лежат в yz - плоскость. Все векторы опорного направления элемента указывают вдоль x - ось. |
y | Элементы массива лежат в zx - плоскость. Все векторы опорного направления элемента указывают вдоль y - ось. |
z | Элементы массива лежат в xy - плоскость. Все векторы опорного направления элемента указывают вдоль z - ось. |
Чтобы включить этот параметр, установите Geometry на URA или UCA.
Radius of UCA (m) — Радиус UCA массивовРадиус массива UCA, заданного как положительная скалярная величина.
Чтобы включить этот параметр, установите Geometry на UCA.
Element positions (m) — Положения конформных элементов массиваПоложения элементов в конформном массиве, заданном как 3 N матрицей действительных значений, где N является числом элементов в конформном массиве. Каждый столбец этой матрицы представляет положение [x;y;z]из элемента массива в системе локальной координаты массивов. Источником системы локальной координаты является (0,0,0). Модули исчисляются в метрах.
Когда вы устанавливаете Specify sensor array as на Replicated subarray, этот параметр применяется к каждому подмассиву.
Чтобы включить этот параметр устанавливает Geometry на Conformal Array.
Element normals (deg) — Направление конформных векторов нормали элемента массиваНаправление векторов нормали элемента в конформном массиве, заданном как 2 1 вектор-столбец или 2 N матрицей. N указывает на число элементов в массиве. Для матрицы каждый столбец задает нормальное направление соответствующего элемента в форме [azimuth;elevation] относительно системы локальной координаты. Система локальной координаты выравнивает положительный x - ось с направлением, нормальным к конформному массиву. Если значение параметров 2 1 вектор-столбец, то же направление обращения используется во всех элементах массива.
Когда вы устанавливаете Specify sensor array as на Replicated subarray, этот параметр применяется к каждому подмассиву.
Можно использовать Element positions (m) и параметры Element normals (deg), чтобы представлять любое расположение, по которому пары элементов отличаются определенными преобразованиями. Преобразования могут объединить перевод, вращение азимута и вращение вертикального изменения. Однако вы не можете использовать преобразования, которые требуют вращения вокруг нормального направления.
Чтобы включить этот параметр, установите Geometry на Conformal Array.
Taper — Заострения элемента массиваСужение элемента, заданное как скаляр с комплексным знаком или 1 с комплексным знаком N вектором-строкой. В этом векторе N представляет число элементов в массиве.
Также известный как element weights, заострения умножают ответы элемента массива. Заострения изменяют и амплитуду и фазу ответа, чтобы уменьшать лепестки стороны или регулировать основную ось ответа.
Если Taper является скаляром, тот же вес применяется к каждому элементу. Если Taper является вектором, вес от вектора применяется к соответствующему элементу датчика. Количество весов должно совпадать с числом элементов массива.
Когда вы устанавливаете Specify sensor array as на Replicated subarray, этот параметр применяется к каждому подмассиву.
Subarray definition matrix — Задайте элементы, принадлежащие подмассивамЗадайте выбор подмассива как M-by-N матрица. M является количеством подмассивов, и N является общим количеством элементов в массиве. Каждая строка матрицы представляет подмассив, и каждая запись в строке указывает, когда элемент принадлежит подмассиву. Когда запись является нулем, элемент не принадлежит подмассив. Ненулевая запись представляет вес с комплексным знаком, применился к соответствующему элементу. Каждая строка должна содержать по крайней мере одну ненулевую запись.
Центр фазы каждого подмассива находится в подмассиве геометрический центр. Подмассив геометрический центр зависит от параметров Geometry и Subarray definition matrix.
Чтобы включить этот параметр, установите Specify sensor array as на Partitioned array.
Subarray steering method — Задайте руководящий метод подмассиваNone (значение по умолчанию) | Phase | TimeРуководящий метод подмассива, заданный как один из
None
Phase
Time
Custom
Выбор Phase или Time открывает Steer входной порт на Narrowband Receive Array, Narrowband Transmit Array, Wideband Receive Array, блоках Wideband Transmit Array, Constant Gamma Clutter и блоках GPU Constant Gamma Clutter.
Выбор Custom открывает WS входной порт на Narrowband Receive Array, Narrowband Transmit Array, Wideband Receive Array, блоках Wideband Transmit Array, Constant Gamma Clutter и блоках GPU Constant Gamma Clutter.
Чтобы включить этот параметр, установите Specify sensor array as на Partitioned array или Replicated subarray.
Phase shifter frequency (Hz) — Частота сдвига фазы Subarray3.0e8 (значение по умолчанию) | положительный скаляр с действительным знакомРабочая частота подмассива, регулирующего фазовращатели, заданные как положительный скаляр с действительным знаком. Модулями является Гц.
Чтобы включить этот параметр, установите Sensor array на Partitioned array или Replicated subarray и набор Subarray steering method к Phase.
Number of bits in phase shifters — Руководящая фаза подмассива переключает биты квантованияРуководящая фаза подмассива переключает биты квантования, заданные как неотрицательное целое число. Значение нуля указывает, что никакое квантование не выполняется.
Чтобы включить этот параметр, установите Sensor array на Partitioned array или Replicated subarray и набор Subarray steering method к Phase.
Subarrays layout — Спецификация положения подмассиваRectangular (значение по умолчанию) | CustomЗадайте размещение реплицированных подмассивов как Rectangular или Custom.
Когда вы устанавливаете этот параметр на Rectangular, используйте Grid size и параметры Grid spacing, чтобы поместить подмассивы.
Когда вы устанавливаете этот параметр на Custom, используйте Subarray positions (m) и параметры Subarray normals, чтобы поместить подмассивы.
Чтобы включить этот параметр, установите Sensor array на Replicated subarray
Grid size — Размерности прямоугольной сетки подмассиваПрямоугольный размер сетки подмассива, заданный как одно положительное целое число или 1 2 вектор-строка из положительных целых чисел.
Если Grid size является целочисленным скаляром, массив имеет равное количество подмассивов в каждой строке и столбце. Если Grid size 1 2 вектор формы [NumberOfRows, NumberOfColumns], первая запись является количеством подмассивов вдоль каждого столбца. Вторая запись является количеством подмассивов в каждой строке. Строка приезжает локальный y - ось, и столбец приезжает локальный z - ось. Рисунок здесь показывает, как можно реплицировать 3 2 подмассив URA с помощью Grid size [1,2].
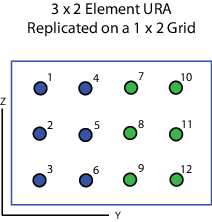
Чтобы включить этот параметр, установите Sensor array на Replicated subarray и Subarrays layout к Rectangular.
Grid spacing (m) — Интервал между подмассивами на прямоугольной сеткеAuto (значение по умолчанию) | положительный скаляр с действительным знаком | 1 2 вектор положительных действительных значенийПрямоугольный интервал сетки подмассивов, заданных как положительный, скаляр с действительным знаком, 1 2 вектор-строка из положительных, действительных значений или Auto. Модули исчисляются в метрах.
Если Grid spacing является скаляром, интервал вдоль строки и интервал вдоль столбца являются тем же самым.
Если Grid spacing является 1 2 вектором-строкой, вектор имеет форму [SpacingBetweenRows,SpacingBetweenColumn]. Первая запись задает интервал между строками вдоль столбца. Вторая запись задает интервал между столбцами вдоль строки.
Если Grid spacing установлен в Auto, репликация сохраняет интервал элемента подмассива для обеих строк и столбцов при создании полного массива. Эта опция доступна только, когда вы задаете Geometry как ULA или URA.
Чтобы включить этот параметр, установите Sensor array на Replicated subarray и Subarrays layout к Rectangular.
Subarray positions (m) — Положения подмассивовПоложения подмассивов в пользовательской сетке, заданной как действительные 3 N матрицей, где N является количеством подмассивов в массиве. Каждый столбец матрицы представляет положение одного подмассива в системе локальной координаты массивов. Координаты выражаются в форме [x; y; z]. Модули исчисляются в метрах.
Чтобы включить этот параметр, установите Sensor array на Replicated subarray и Subarrays layout к Custom.
Subarray normals — Направление векторов нормали подмассиваЗадайте нормальные направления подмассивов в массиве. Это значение параметров является 2 N матрицей, где N является количеством подмассивов в массиве. Каждый столбец матрицы задает нормальное направление соответствующего подмассива в форме [azimuth;elevation]. Угловые модули в градусах. Углы заданы относительно системы локальной координаты.
Можно использовать Subarray positions и параметры Subarray normals, чтобы представлять любое расположение, по которому пары подмассивов отличаются определенными преобразованиями. Преобразования могут объединить перевод, вращение азимута и вращение вертикального изменения. Однако вы не можете использовать преобразования, которые требуют вращения вокруг нормального.
Чтобы включить этот параметр, установите параметр Sensor array на Replicated subarray и Subarrays layout к Custom.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
