Непрерывный драйвер клапана с выходом, пропорциональным входному сигналу
Приводы клапана

Блок Proportional and Servo-Valve Actuator представляет электромагнитный привод, который используется в пропорциональном и сервоклапанах, чтобы управлять золотником или другим рабочим участником. Блок предназначается, чтобы работать с одной из моделей распределительного клапана, чтобы сформировать желательную настройку пропорционального или сервоклапана. Блок реализован как модель, основанная на таблице данных и воспроизводит только отношение ввода/вывода или переходный процесс привода, как представлено в каталоге или таблице данных.
Блок Proportional and Servo-Valve Actuator создается с помощью блоков из библиотеки Simscape™ Physical Signals. И вход и выход блока являются физическими сигналами. Блок-схему модели показывают в следующем рисунке.
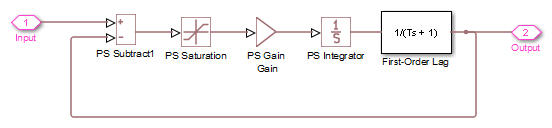
Модель привода создана блоков Физических сигналов Библиотеки Основы: PS Subtract, PS Saturation, PS Gain, PS Integrator. Задержка первого порядка располагается как подсистема, как показано ниже,
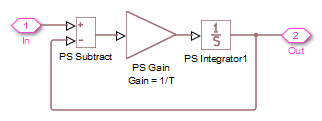
и также создается из блоков Физических сигналов: PS Subtract, PS Gain и PS Integrator. Передаточная функция задержки
где T является Time constant задержки. Значение этого параметра установлено через параметр Gain блока PS Gain в подсистеме Задержки Первого порядка путем установки его равный 1/T.
Типичные переходные процессы в сервоклапане или высококачественном пропорциональном клапане показывают в следующем рисунке. Единственной разницей между этими двумя ответами в фигуре является значение насыщения.
Можно настроить параметры блоков, такие как насыщение, усиление, и постоянная времени, чтобы сделать переходные процессы достаточно близко к обеспеченным в таблице данных. Самый эффективный способ настроить параметры состоит в том, чтобы использовать программное обеспечение Simulink Design Optimization.
Этот блок создается из блоков из библиотеки Simscape Physical Signals (таких как PS Add, PS Gain, и так далее). В настоящее время блоки в библиотеке Physical Signals не поддерживают модульное распространение и проверку. Для получения дополнительной информации смотрите, Как работать с Физическими единицами измерения (Simscape).
Усиление блока PS Gain в верхнем уровне блок-схемы модели привода. Значением по умолчанию является 377.
Постоянная времени задержки первого порядка. Параметр Gain блока PS Gain в подсистеме Задержки Первого порядка равен 1/Time constant. Значением по умолчанию является 0.002 s.
Уровень насыщенности блока PS Saturation в модели привода. Значением по умолчанию является 0.3.
Блок имеет один входной порт физического сигнала и один выходной порт физического сигнала.
Позиционер с замкнутым циклом с Переменным Смещением Компенсированный Давлению пример Насоса иллюстрирует использование блока Proportional and Servo-Valve Actuator в гидравлических системах.
2-Position Valve Actuator | 3-Position Valve Actuator | Hydraulic Double-Acting Valve Actuator | Hydraulic Single-Acting Valve Actuator
