В этом примере показано, как варьироваться дорожные условия в течение симуляции полноприводного испытательного стенда транспортного средства. Модель является версией sdl_vehicle_4wd_testbed, который обновляется, чтобы включать блоки Road Profile и для передних и для задних шин. Когда транспортное средство перемещается, параметры оси и положение центра тяжести (CG) определяют положение передних и задних осей. Блоки Road Profile используют положения оси, чтобы определить угол транспортного средства и коэффициенты трения шины на основе параметров, которые вы задаете.
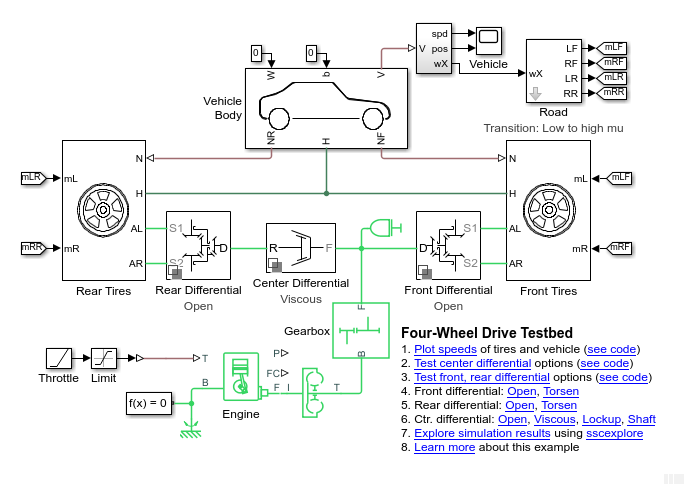
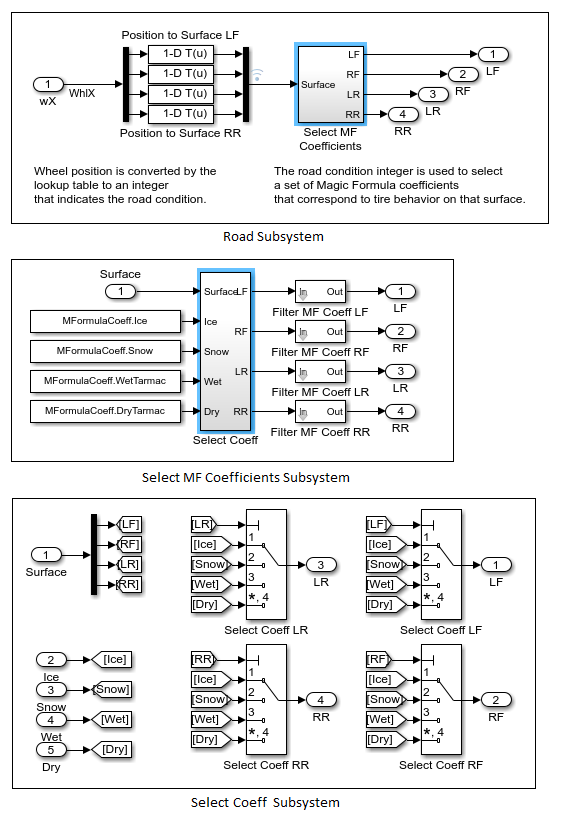
Исходная модель решает, что волшебные коэффициенты формулы на основе положения транспортного средства относительно его положения при симуляции запускаются. Рисунки показывают оригинал и обновленные модели.
Новая модель включает блоки Road Profile и для права - и для шин левой стороны. Чтобы открыть модель, в командной строке MATLAB, входят
open_system('sdl_vehicle_road_4wd_testbed')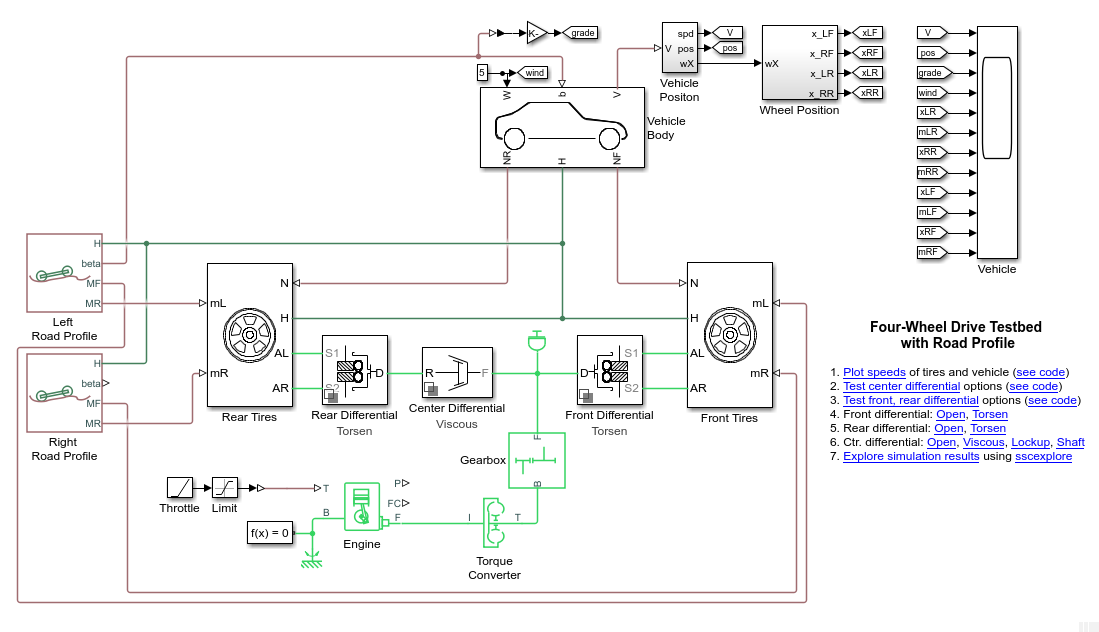
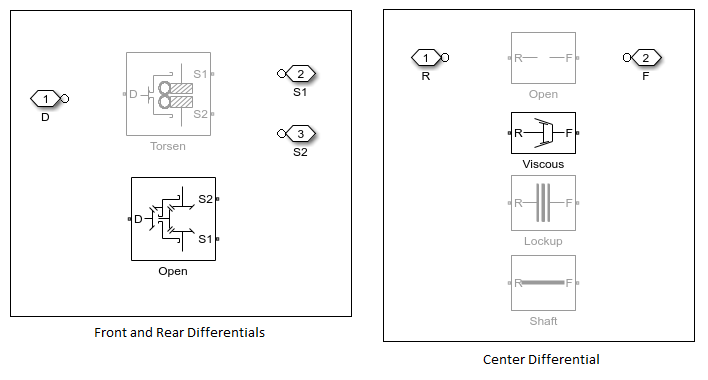
В обеих моделях передняя сторона, задняя часть и центральные дифференциалы представлены различными подсистемами.
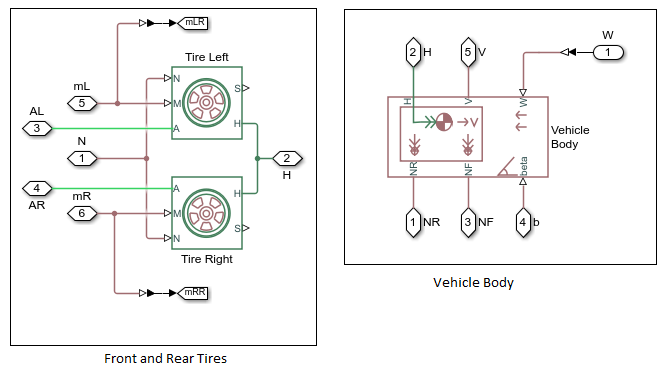
Подсистемы передней и задней шины содержат блоки Tire (Magic Formula), в то время как подсистема Vehicle Body является маской для блока Vehicle Body.
Обновления, которые позволяют модели определять дорожные условия с помощью блоков Road Profile:
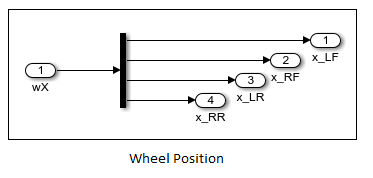
Замена подсистемы Road с подсистемой Wheel Position. Дорожная подсистема содержит три уровня подсистем что использование модели, чтобы определить Волшебные коэффициенты Формулы для шин в процессе моделирования.
Сложение блоков Road Profile допускает замену системы Wheel Position с намного более простой подсистемой Wheel Position. Новые демультиплексоры подсистемы сигналы положения колеса.
Параметризация для добавленного Road Profile блокируется для правых и левых шин:
Основной
Horizontal distance from CG to front axle — x_f
Horizontal distance from CG to rear axle — x_r
Horizontal distance for vertical profile — x_height_vector
Vertical profile — height_vector
Трение
Friction output — Physical signal Magic Formula coefficients
Horizontal distance for friction profile — x_friction_vector
Magic Formula coefficients for front axle — MF_M_matrix
Magic Formula coefficients for front axle — MR_M_matrix
Переменная положения
Override — выбрать
Beginning Value — x_0
Блок Vehicle Body обновления параметра Main:
Horizontal distance from CG to front axle — x_f
Horizontal distance from CG to rear axle — x_r
Определения переменной для модели:
x_f=1.4; x_r=1.6; x_height_vector=[-10, 0, 10]; height_vector=[0, 0, 0.25]; x_friction_vector = [ -10, 5, 10, 15 ]; MF_M_matrix = [10 1.9 1 0.97;... 4 2 0.1 1;... 12 2.3 0.82 1;... 10 1.9 1 0.97]; MR_M_matrix = [10 1.9 1 0.97;... 12 2.3 0.82 1;... 12 2.3 0.82 1;... 10 1.9 1 0.97]; x_0 = 0;
Дополнительные экологические обновления:
Блок Road Profile лево-шины вводит переменный дорожный класс. Блок Gain преобразует переменную класса, beta от радианов до степеней.
Встречный ветер включен при помощи ненулевого значения для блока Constant.
Обновления блока сигнала:
Outports и блоки Inports заменяются блоками Connection Port.
Goto и блоки From используются к релейным сигналам к Scope.
Визуализация данных и регистрирующие обновления:
Блок Scope обновляется, чтобы показать положения шины, Волшебные Коэффициенты Формулы, встречный ветер и дорожное вертикальное изменение.
Имя simlog обновляется, чтобы совпадать с именем обновленной модели.
Дифференциальный код генерации теста и графика обновляется, чтобы использовать новое имя simlog.
Чтобы запустить симуляцию и сгенерировать график результатов, нажмите Plot speeds.
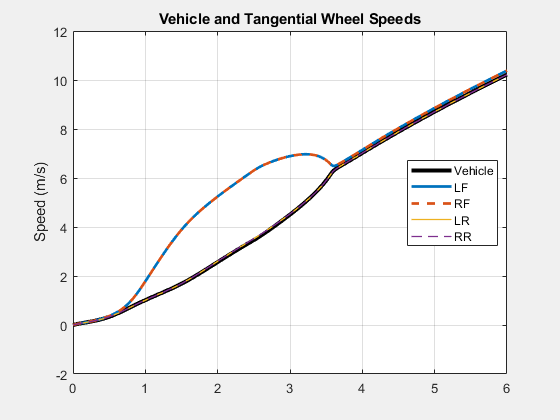
Передняя сторона утомляет промах опыта посреди симуляции из-за скользких условий, связанных с [4 2 0.1 1] Волшебные Коэффициенты, которые использует симуляция, когда положения передних шин в 5 - 10 метрах от исходных положений.
Чтобы видеть, как дорожная наклонная поверхность, встречный ветер, положение шины, и скорость транспортного средства и положение относятся друг к другу и к Волшебным Коэффициентам, открывают блок Scope.
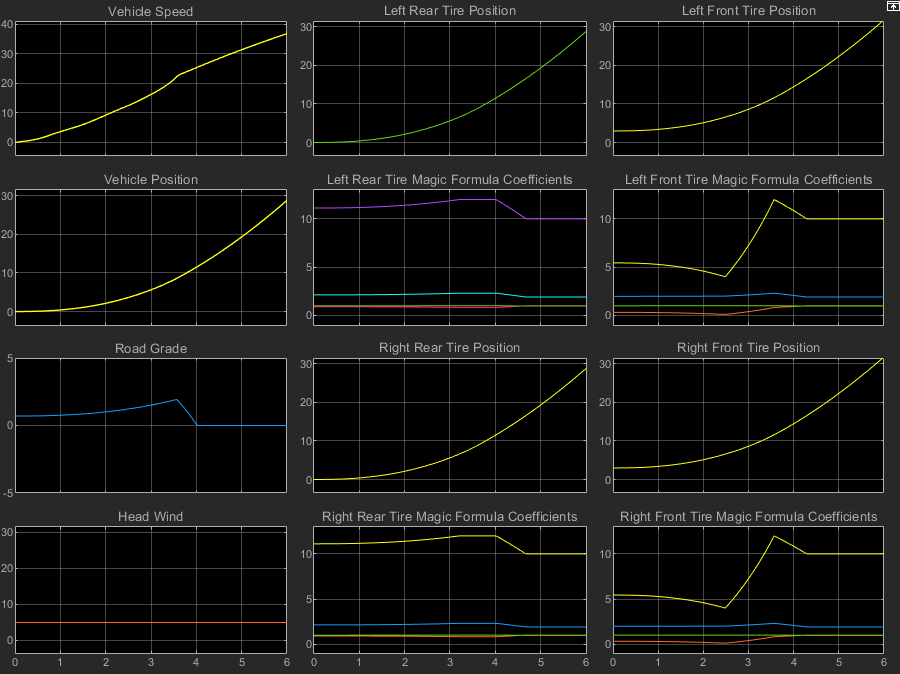
Скорость транспортного средства увеличивается немного, когда дорожный класс уменьшается.
Чтобы протестировать передние и задние дифференциалы и в Открытых вариантах и в вариантах Торсена, нажмите Test front, rear differential.
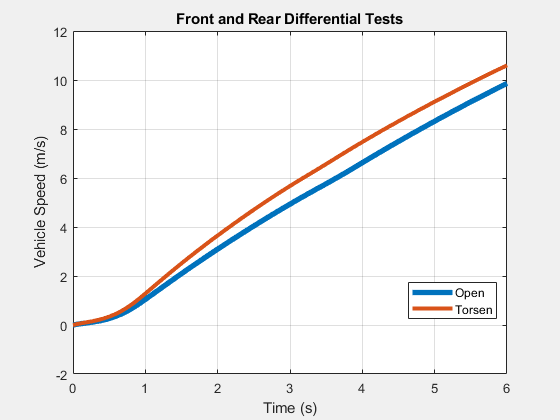
Настройка дифференциала Торсена приводит к более высокой скорости в течение симуляции.
Чтобы протестировать все варианты центрального дифференциала, нажмите Test center differential.
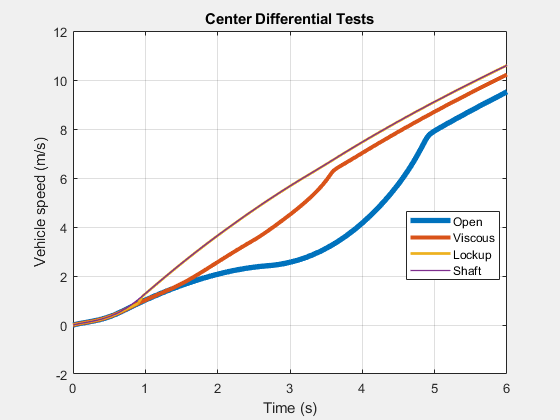
Открытые и вязкие дифференциальные настройки приводят к ниже, больше переменной скорости, когда класс изменяется во время симуляции.
Road Profile | Tire (Friction Parameterized) | Tire (Magic Formula) | Tire-Road Interaction (Magic Formula) | Vehicle Body
