Выполните преобразование от трехфазного (abc) сигнал к системе координат вращения dq0 или инверсии
Simscape / Электрический / Специализированные Энергосистемы / Control & Measurements / Преобразования

Abc с блоком dq0 выполняет преобразование Парка во вращающейся системе координат.
dq0 с блоком abc выполняет обратное преобразование Парка.
Блок поддерживает эти два соглашения, используемые в литературе в преобразовании Парка:
При вращении системы координат, выровненной с осью в t = 0, то есть, в t = 0, d-ось выравнивается с ось. Этот тип преобразования Парка также известен как основанное на косинусе преобразование Парка.
Система координат вращения выровняла 90 градусов позади оси, то есть, в t = 0, q-ось выравнивается с ось. Этот тип преобразования Парка также известен как основанное на синусе преобразование Парка. Используйте его в моделях Simscape™ Electrical™ Specialized Power Systems трехфазных синхронных и асинхронных машин.
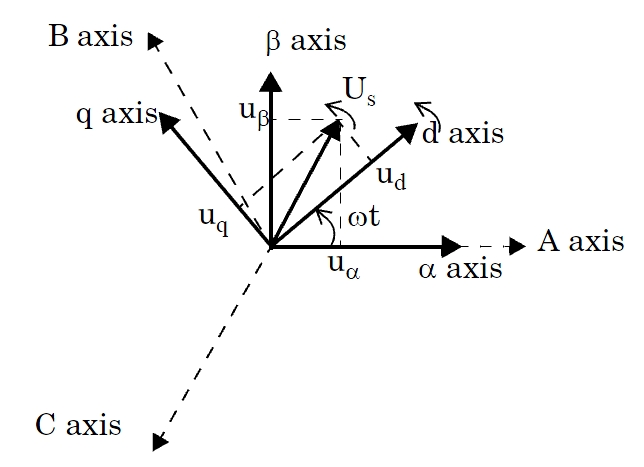
Выведите dq0 компоненты из сигналов abc путем выполнения abc к αβ0 преобразованию Кларка в фиксированной системе координат. Затем выполните αβ0 к dq0 преобразованию во вращающейся системе координат, то есть, − (ω.t), вращение на пробеле векторизовало Нас = uα + j · uβ.
abc-to-dq0 преобразование зависит от выравнивания системы координат dq в t = 0. Положение вращающейся системы координат дано ω.t (где ω представляет скорость вращения системы координат dq).
Когда вращающаяся система координат выравнивается с осью, следующие отношения получены:
Обратным преобразованием дают
Когда вращающаяся система координат выравнивается 90 градусов позади оси, следующие отношения получены:
Обратным преобразованием дают
Выберите выравнивание вращающейся системы координат t = 0 из d-q-0 компонентов трехфазного сбалансированного сигнала:
(величина положительной последовательности = 1.0 pu; угол фазы = 0 степеней)
Когда вы выбираете Aligned with phase A axis, d-q-0 компоненты являются d = 0, q = −1, и нуль = 0.
Когда вы выбираете 90 degrees behind phase A axis, опция по умолчанию, d-q-0 компоненты являются d = 1, q = 0, и нуль = 0.
abcВекторизованный сигнал abc.
dq0Векторизованный сигнал dq0.
wtУгловое положение dq, вращающего систему координат, в радианах.
power_Transformations пример показывает различное использование блоков, выполняющих преобразования Парка и Кларк.
