Выполните преобразование от αβ0 стационарной системы координат до системы координат вращения dq0 или инверсии
Simscape / Электрический / Специализированные Энергосистемы / Control & Measurements / Преобразования

Альфа-Бета Нуль с блоком dq0 выполняет преобразование αβ0 компонентов Кларка в фиксированной системе координат к компонентам Парка dq0 во вращающейся системе координат.
dq0 с блоком Alpha-Beta-Zero выполняет преобразование компонентов Парка dq0 во вращающейся системе координат к αβ0 компонентам Кларка в фиксированной системе координат.
Блок поддерживает эти два соглашения, используемые в литературе в преобразовании Парка:
Вращение системы координат, выровненной с осью в t = 0. Этот тип преобразования Парка также известен как основанное на косинусе преобразование Парка.
Вращение системы координат выровняло 90 градусов позади оси. Этот тип преобразования Парка также известен как основанное на синусе преобразование Парка. Используйте его в моделях Simscape™ Electrical™ Specialized Power Systems трехфазных синхронных и асинхронных машин.
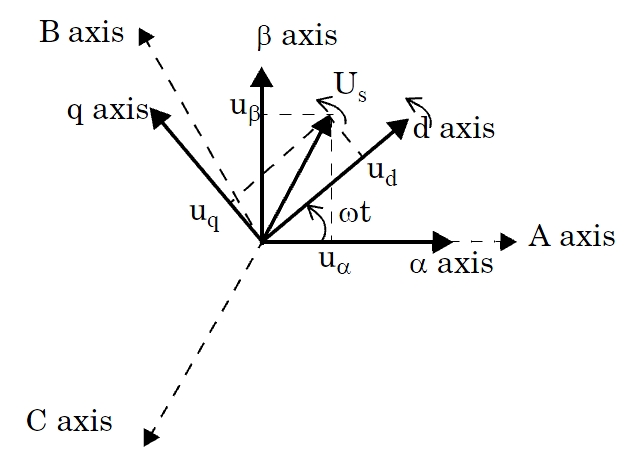
При знании, что положение вращающейся системы координат дано ω.t (где ω представляет скорость вращения системы координат), αβ0 к dq0 преобразованию выполняет − (ω.t), вращение на пробеле векторизовало Нас = uα + j · uβ. Униполярный компонент или компонент нулевой последовательности остаются неизменными.
В зависимости от выравнивания системы координат в t = 0, dq0 компоненты выведены из αβ0 компонентов можно следующим образом:
Когда вращающаяся система координат выравнивается с осью, следующие отношения получены:
Обратным преобразованием дают
Когда вращающаяся система координат выравнивается 90 градусов позади оси, следующие отношения получены:
Обратным преобразованием дают
Abc к альфа-Бета Нулевому преобразованию применилась к набору сбалансированных трехфазных синусоидальных количеств ua, ub, uc дает вектор пробела Нас, uα которых и координаты uβ в фиксированной системе координат варьируются синусоидально со временем. В отличие от этого abc-to-dq0 преобразование (Преобразование парка) применилось к набору сбалансированных трехфазных синусоидальных количеств ua, ub, uc дает вектор пробела Нас, ud которых и координаты uq в dq вращающаяся система координат остается постоянной.
Выберите выравнивание вращающейся системы координат, когда вес = 0, dq0 компонентов трехфазного сбалансированного сигнала:
(величина положительной последовательности = 1.0 pu; угол фазы = 0 степеней)
Когда вы выбираете Aligned with phase A axis, dq0 компоненты являются d = 0, q = −1, и нуль = 0.
Когда вы выбираете 90 degrees behind phase A axis, опция по умолчанию, dq0 компоненты являются d = 1, q = 0, и нуль = 0.
Векторизованный сигнал αβ0.
dq0Векторизованный сигнал dq0.
wtУгловое положение, в радианах, dq, вращающего систему координат относительно стационарной системы координат.
power_Transformations пример показывает различное использование блоков, выполняющих преобразования Парка и Кларк.
