Динамика модели одной фазы асинхронная машина с ротором клетки белки
Simscape / Электрический / Специализированные Энергосистемы / Основные Блоки / Машины
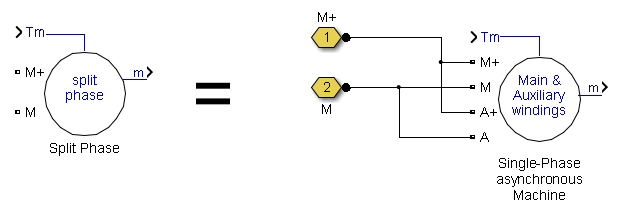
Эта машина имеет две обмотки: основной и вспомогательный. С моделью можно симулировать расщепленную фазу, запуск конденсатор, конденсаторный конденсатор запуска управляемые, и основные & вспомогательные режимы работы обмоток.
Для режима расщепленной фазы основные и вспомогательные обмотки внутренне соединяются можно следующим образом:
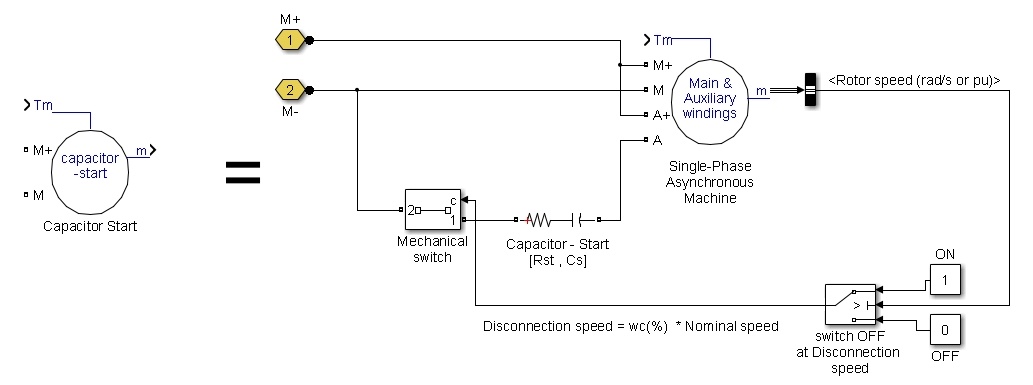
Для режима запуска конденсатор основные и вспомогательные обмотки внутренне соединяются можно следующим образом:
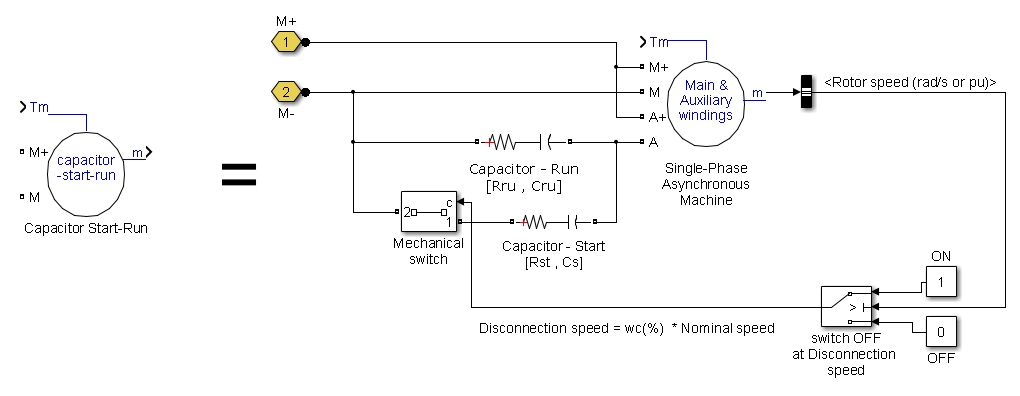
Для конденсаторного конденсатора запуска управляемый режим основные и вспомогательные обмотки внутренне соединяются можно следующим образом:
Электрическая часть машины представлена моделью в пространстве состояний четвертого порядка и механической деталью системой второго порядка. Все электрические переменные и параметры отнесены в статор, обозначенный следующими главными знаками в уравнениях машины. Весь статор и количества ротора находятся в системе координат статора (dq система координат). Индексы заданы в следующей таблице.
Индекс | Определение |
|---|---|
d | d количество оси |
q | q количество оси |
r | Упомянутый основное извилистое количество ротора |
R | Упомянутый вспомогательное извилистое количество ротора |
s | Основное извилистое количество статора |
S | Вспомогательное извилистое количество статора |
l | Индуктивность утечки |
m | Намагничивание индуктивности |
| V qs = R siqs + d φ qs/dt | φ qs = L ssiqs + L msi'qr | |
| V ds = R Sids + d φ ds/dt | φ ds = L SSids + L mSi'dr | |
| V' qr = R' ri'qr + d φ' qr/dt – (N s/NS) ω rφ'dr | φ' qr = L' ri'qr + L msiqs | |
| V' доктор = R' Ri'dr + d φ' dr/dt + (N S/Ns) ω rφ'qr | где | φ' доктор = L' RRi'dr + L mSids |
| T e = p [(N S/Ns) φ' qri'dr – (N s/NS) φ' dri'qr] | L ss = L ls + мс L | |
| L SS = L lS + мс L | ||
| RR L' = L' lr + мс L | ||
| RR L' = L' lR + мс L |
Система координат
Система координат, зафиксированная в статоре, преобразует напряжения и токи к системе координат dq.
Следующие отношения описывают преобразования системы координат ab-to-dq, применился к одной фазе асинхронная машина.
Переменная f может представлять или напряжение, токи или потокосцепление.
Асинхронные параметры блоков машины одной фазы определяются следующим образом (все количества отнесены в статор).
Параметр | Определение |
|---|---|
RS, Lls | Основное извилистое сопротивление статора и индуктивность утечки |
RS, LlS | Вспомогательное извилистое сопротивление статора и индуктивность утечки |
R′r, L′lr | Основное извилистое сопротивление ротора и индуктивность утечки |
R′R, L′lR | Вспомогательное извилистое сопротивление ротора и индуктивность утечки. Эти два значения равны основному извилистому сопротивлению ротора и значениям индуктивности утечки, соответственно. |
Lms | Основная индуктивность намагничивания обмотки |
LmS | Вспомогательная индуктивность намагничивания обмотки |
Lss, L′rr | Общий основной извилистый статор и индуктивность ротора |
LSS, L′RR | Общий вспомогательный извилистый статор и индуктивность ротора |
Сосуд, МСФО Vbs, ibs Vqs, IQ | Основное извилистое напряжение статора и текущий Вспомогательное извилистое напряжение статора и текущий q напряжение статора оси и текущий |
V′qr, i′qr | q напряжение ротора оси и текущий |
Vds, идентификаторы | d напряжение статора оси и текущий |
V′dr, i′dr | d напряжение ротора оси и текущий |
ϕqs, ϕds | Статор q и d потоки оси |
ϕ ′ qr, ϕ ′ доктор | Ротор q и d потоки оси |
ωm | Скорость вращения ротора |
Θm | Угловое положение ротора |
p | Количество пар полюса |
ωr | Электрическая скорость вращения (ωm x p) |
Θr | Электрическое угловое положение ротора (Θm x p) |
Te | Электромагнитный крутящий момент |
TM | Крутящий момент механического устройства вала |
J F | Объединенный ротор и коэффициент инерции загрузки в (kg.m2). Установите на большое количество, чтобы симулировать заблокированный ротор. Объединенный ротор и коэффициент вязкого трения загрузки. |
H | Объединенный ротор и инерция загрузки, постоянная в (s). Установите на большое количество, чтобы симулировать заблокированный ротор. |
Не уточнено NS Rst Cs Rrun Crun | Количество эффективных очередей основной обмотки. Количество эффективных очередей вспомогательной обмотки. Запустите конденсатор сопротивление Запустить конденсатор Управляемое конденсатором сопротивление Управляемый конденсатором |
N | Отношение количества эффективных очередей вспомогательной обмотки и количества эффективных очередей основной обмотки. |
Можно принять решение между двумя типами модулей задать электрические и механические параметры модели, на модульное диалоговое окно и диалоговое окно SI. Оба блока моделируют ту же машину. В зависимости от диалогового окна, которое вы используете, Simscape™ Electrical™, Специализированные Энергосистемы автоматически преобразуют параметры, в которые вы задаете на модульные параметры. Модель Simulink® блока Single Phase Asynchronous Machine использует на модульные параметры.
Выбор крутящий момент применился к валу как к входу Simulink блока, или представлять вал машины Simscape вращательный механический порт.
Выберите Torque Tm (значение по умолчанию), чтобы задать вход крутящего момента, в N.m или в pu и маркировке изменения входа блока к TM. Скорость машины определяется Инерцией машины J (или инерцией постоянный H для pu машины) и различием между прикладной механической TM крутящего момента и внутренним электромагнитным крутящим моментом Те. Соглашение знака для механического крутящего момента состоит в том, когда скорость положительна, положительный сигнал крутящего момента указывает на моторный режим, и отрицательный сигнал указывает на режим генератора.
Выберите Mechanical rotational port добавить в блок порт вращательного механического устройства Simscape, который позволяет связь вала машины с другими блоками Simscape, которые имеют порты вращательного механического устройства. Вход Simulink, представляющий механическую TM крутящего момента машины, затем удален из блока.
Следующая фигура указывает, как соединить Идеальный Исходный блок Крутящего момента с библиотеки Simscape на вал машины, чтобы представлять машину в моторном режиме, или в режиме генератора, когда скорость ротора положительна.
Задайте на модульное диалоговое окно или диалоговое окно SI. Значением по умолчанию является SI.
Задайте один из четырех типов одной фазы асинхронные машины: Split Phase (значение по умолчанию), Capacitor-Start, Capacitor-Start-Run, или Main & auxiliary windings.
Когда этот флажок устанавливается, измерение, выход использует имена сигнала, чтобы идентифицировать метки шины. Выберите эту опцию для приложений, которые требуют, чтобы метки сигнала шины имели только алфавитно-цифровые символы.
Когда этот флажок снимается (значение по умолчанию), измерение, выход использует определение сигнала, чтобы идентифицировать метки шины. Метки содержат неалфавитно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink.
Номинальная полная мощность Pn (ВА), RMS Vn (V) и частота fn (Гц). Значением по умолчанию является [ .25*746 110 60].
RS сопротивления статора (Ω или pu) и индуктивность утечки Lls (H или pu). Значением по умолчанию является [2.02 7.4e-3] (SI) и [0.031135 0.042999] (pu).
RR сопротивления ротора' (Ω или pu) и индуктивность утечки Llr' (H или pu), оба упомянули статор. Значением по умолчанию является [4.12 5.6e-3] (SI) и [0.063502 0.03254] (pu).
Индуктивность намагничивания Lms (H или pu). Значением по умолчанию является 0.1772 (SI) и 1.0296 (pu).
Сопротивление статора RS (Ω или pu) и индуктивность утечки LlS (H или pu). Обратите внимание на то, что Вспомогательные извилистые параметры ротора приняты, чтобы быть равными основному извилистому сопротивлению ротора и значениям индуктивности утечки. Поэтому это не требуется, чтобы задавать их в диалоговом окне. Значением по умолчанию является [7.14 8.5e-3] (SI) и [0.11005 0.049391] (pu).
Для диалогового окна единиц СИ: объединенная машина и коэффициент инерции загрузки J (kg.m2), объединенный коэффициент вязкого трения F (N.m.s), количество пар полюса p и отношения количества эффективных очередей вспомогательной обмотки и количества эффективных очередей основной обмотки. модульное диалоговое окно pu: инерция постоянный H (s), объединенный коэффициент вязкого трения F (pu) и количество пар полюса p. Значением по умолчанию является [0.0146 0 2 1.18] (SI) и [1.3907 0 2 1.18] (pu).
Емкость запуска Cs (фарада или pu) и конденсаторное серийное сопротивление Rst (Ω или pu). Значением по умолчанию является [2 254.7e-6] (SI) и [0.030826 6.2297] (pu).
Емкость запуска Crun (фарада или pu) и серийное сопротивление Rrun (фарада или pu). Значением по умолчанию является [18 21.1e-6] (SI) и [0.27744 0.51608] (pu).
Задает скорость (%), когда вспомогательная обмотка может быть отключена. Значением по умолчанию является 75.
Задает начальную скорость (%). Значением по умолчанию является 0.
Задает шаг расчета, используемый блоком. Чтобы наследовать шаг расчета, заданный в блоке Powergui, установите этот параметр на −1 (значение по умолчанию).
TmВход Simulink блока является механическим крутящим моментом в вале машины. Когда вы используете маску параметров SI, вход является сигналом в N.m; в противном случае это находится в pu.
mSimulink выход блока является вектором, содержащим сигналы измерения. Можно демультиплексировать эти сигналы при помощи блока Селектора Шины, обеспеченного в Библиотеке Simulink. В зависимости от типа маски вы используете, модули находятся в SI, или в pu.
Имя | Определение | Модули |
|---|---|---|
iar | Ротор текущий ir_a | A или pu |
ibr | Ротор текущий ir_b | A или pu |
iqr | Ротор текущий IQ | A или pu |
idr | Ротор текущий ID | A или pu |
phiqr | Поток ротора phir_q | V.s или pu |
phidr | Поток ротора phir_d | V.s или pu |
МСФО | Основной извилистый статор текущий ia | A или pu |
ibs | Вспомогательный извилистый статор текущий ib | A или pu |
phiqs | Поток статора phis_q (V.s) | V.s или pu |
phids | Поток статора phis_d (V.s) | V.s или pu |
vc | Конденсатор напряжения Vc | V или pu |
w | Скорость ротора | rad/s |
Te | Электромагнитный крутящий момент Те | N.m или pu |
тета | Угол ротора thetam | рад |
Блок Single Phase Asynchronous Machine не включает представление железных потерь и насыщения.
power_singlephaseASM пример показывает использование блока Single Phase Asynchronous Machine в двух режимах работы.
[1] Краузе, P.C., О. Уосинкзук, и С.Д. Садхофф, анализ электрического машинного оборудования, нажатия IEEE, 1995.
