Постоянный магнит синхронный контроллер ослабления поля машины
Simscape / Электрический / Управление / Управление PMSM

Блок PMSM Field-Weakening Controller реализует ослабляющий поле контроллер для постоянного магнита синхронной машины (PMSM).
Используйте этот блок, чтобы осуществить ограничения напряжения фазы на управляемый текущим образом PMSM. Блок уменьшает напряжение фазы PMSM путем корректировки угла ссылочного текущего вектора, когда величина вектора напряжения превышает свой предел. Блок не настраивает амплитуду текущего вектора.
Можно использовать этот блок в качестве части системы управления PMSM:
Используйте нулевой d - метод управления оси, чтобы сгенерировать неограниченный текущий ссылочный вектор, чтобы управлять PMSM. Можно реализовать эту стратегию с блоком PMSM Current Reference Generator.
Используйте этот блок, чтобы настроить угол текущего ссылочного вектора для того, чтобы удовлетворить ограничениям фазы напряжения.
Используйте PMSM Current Controller, чтобы сгенерировать вектор ссылки напряжения, чтобы управлять PMSM.
Внутренний интегральный контроллер выводит factor β∈[0,1], который определяется тем, как тесно необходимое напряжение статора приближается к влажному значению напряжения в любой момент вовремя:
Когда необходимое напряжение статора превышает предел, β стремится к 0, уменьшая q - текущая ось.
Когда необходимое напряжение статора в его пределе, β стремится к 1, и угол остается неизменным.
Эта схема показывает структуру ослабляющего поле контроллера.
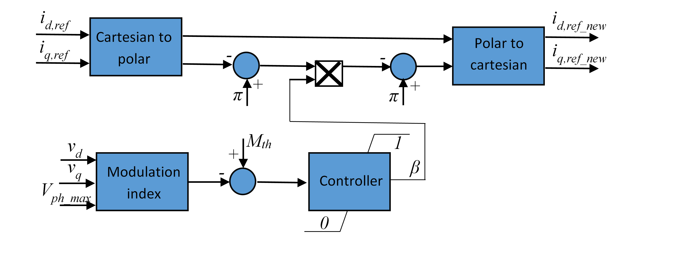
В схеме вы предоставляете порогу индекса модуляции Mth как входной параметр с блоком, и блок вычисляет индекс модуляции M как отношение между фактическим напряжением фазы и максимальным доступным напряжением фазы Vph_max:
где vd и vq являются d-осью и компонентами q-оси вектора напряжения.
[1] Вай, J. и Т. М. Дженс. "Новый метод управления для достижения широкой постоянной операции скорости степени с внутренней машиной генератора переменного тока PM". На Промышленной Конференции по Приложениям. Издание 2, 2001, стр 807-814.
