Solenoid
Электрические характеристики и сгенерированная сила соленоида
Описание
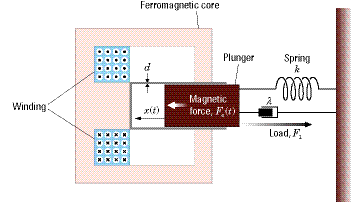
Блок Solenoid представляет электрические характеристики и сгенерированную силу для соленоида в следующем рисунке:
Пружина возврата является дополнительной. Чтобы удалить эффекты этого возникают из модели, устанавливают параметр Spring constant на 0.
Чтобы показать направление, в котором действует соленоид, значок блока изменяется динамически на основе значения параметра Motion direction under excitation.
| Когда параметр Motion direction under excitation устанавливается на... | Блокируйте значок |
|---|
Port R moves away from port C
|
|
Port R moves towards port C
|
|
Уравнение движения для ныряльщика как функция положения, x:
где Fe является электромагнитной силой, Fl является силой загрузки, λ является вязким сроком затухания, и m является массой ныряльщика. Электромагнитная сила связана с текущим соленоидом и индуктивность:
Индуктивность, которая выведена в [1], может быть записана как:
где α и β являются константами. Включение предыдущего уравнения в уравнение для электромагнитной силы дает штриховое силой отношение соленоида для текущего i0:
Блок Solenoid решает для α и β путем взятия двух заданных сил и штриховых измерений и замены ими в предыдущее уравнение. Это решает получившиеся уравнения для α и β.
Положительный ток от электрического + до портов - создает отрицательную силу (т.е. силу получения по запросу) от механического C до портов R.
Тепловой порт
Блок имеет дополнительный тепловой порт, скрытый по умолчанию. Чтобы осушить тепловой порт, щелкните правой кнопкой по блоку по своей модели, и затем из контекстного меню выбирают > > . Это действие отображает тепловой порт H на значке блока и отсоединяет параметры Thermal Port и Temperature Dependence.
Используйте тепловой порт, чтобы симулировать эффекты медных потерь сопротивления, которые преобразуют электроэнергию нагреться. Для получения дополнительной информации об использовании тепловых портов и на Temperature Dependence и параметрах Thermal Port, смотрите Термальные эффекты Симуляции во Вращательных и Поступательных Приводах.
Переменные
Используйте раздел Variables интерфейса блока, чтобы установить приоритет и начальные целевые значения для переменных в блоках до симуляции. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках (Simscape).
Используйте переменную Position, X, чтобы поставить цель для начального положения ныряльщика в начале симуляции.
Примечание
Переменная Position, X является начальным воздушным зазором или диапазоном соленоида, и так должна быть больше или быть равна 0.
Порты
Сохранение
развернуть все
+ — Положительный терминал
электрический
Электрический порт сохранения сопоставил с соленоидом положительный терминал.
- — Отрицательный терминал
электрический
Электрический порт сохранения сопоставил с соленоидом отрицательный терминал.
C — Случай
механическое устройство
Порт механической передачи сопоставлен со случаем.
R — Ныряльщик
механическое устройство
Порт механической передачи сопоставлен с ныряльщиком.
Параметры
развернуть все
Магнитная сила
Motion direction under excitation — Направление движения при возбуждении
Port R moves towards port C (значение по умолчанию) | Port R moves away from port C
Выберите одну из следующих опций для типа направления движения при возбуждении:
Pull-in forces [F1 F2] — Вектор сил получения по запросу - в
[7.5, .75] N (значение по умолчанию)
Вектор значений силы в двух точках на штриховой силой кривой. Вторая точка измерения должна быть одним махом, который больше той из первой точки измерения. Когда производитель не обеспечивает штриховую силой кривую, установите F1 на силу содержания (когда X1 = 0), и F2 к получению по запросу - в обеспечивают при выполнении соленоида в значениях Rated current Idc и Rated voltage Vdc.
Stroke (air gap) [X1 X2] — Вектор диапазонов
[1, 5] mm (значение по умолчанию)
Вектор диапазона (расстояние ныряльщика от положения полностью закрытого отверстия) значения в двух точках на штриховой силой кривой. Вторая точка измерения должна быть одним махом, который больше той из первой точки измерения. Чтобы гарантировать конечное значение силы, точки должны удовлетворить условию
Rated voltage Vdc — Номинальное напряжение
50 V (значение по умолчанию)
Напряжение, при котором соленоид оценивается, чтобы действовать. Это значение напряжения используется, чтобы измерить значения Stroke [X1 X2] и Forces [F1 F2].
Rated current Idc — Номинальный ток
0.05 A (значение по умолчанию)
Ток, который течет, когда соленоид предоставляется напряжением Rated voltage Vdc.
Механическое устройство
Spring constant — Коэффициент упругости
200
N/m (значение по умолчанию)
Постоянное представление жесткости пружины, которая действует, чтобы отречься от ныряльщика, когда соленоид выключается. Сила является нулем, когда ныряльщик перемещен к значению параметров Stroke for zero spring force. Обнулите коэффициент упругости, если нет никакой пружины.
Stroke for zero spring force — Диапазон для нулевой упругой силы
5 mm (значение по умолчанию)
Диапазон, в котором пружина не обеспечивает силы.
Damping — Затухание
1 N/(m/s) (значение по умолчанию)
Термин λ в уравнении движения для ныряльщика как функция положения, которое линейно ослабляет движение ныряльщика. Значение может быть нулем.
Plunger mass — Масса ныряльщика
0.05 kg (значение по умолчанию)
Вес соленоидного ныряльщика. Значение может быть нулем.
Maximum stroke — Максимальный диапазон
Inf
mm (значение по умолчанию)
Максимальная сумма, которой может быть перемещен ныряльщик. Можно использовать этот параметр, чтобы смоделировать твердый endstop, который ограничивает диапазон. Значением по умолчанию является Inf мм, что не означает штрихового предела.
Contact stiffness — Упругость контакта
1e6
N/m (значение по умолчанию)
Жесткость контакта ныряльщика, который моделирует жесткий упор в минимуме (x = 0) и максимум (x = Maximum stroke) положения ныряльщика.
Contact damping — Свяжитесь с затуханием
500 N/(m/s) (значение по умолчанию)
Затухание контакта ныряльщика, который моделирует жесткий упор в минимуме (x = 0) и максимум (x = Maximum stroke) положения ныряльщика.
Ссылки
[1] С.Е. Лышевский. Электромеханические системы, электрические машины и прикладная механотроника. CRC, 1999.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Смотрите также
Введенный в R2008a