Используя Control System Designer, можно настроить компенсаторы, использующие различные графические и автоматизированные настраивающие методы.
Используйте графические настраивающие методы, чтобы в интерактивном режиме добавить, изменить, и удалить полюса контроллера, нули и усиления.
| Настройка метода | Описание | Полезный для |
|---|---|---|
| Bode Editor | Настройте свой компенсатор, чтобы достигнуть определенной частотной характеристики разомкнутого цикла (формирование цикла). | Корректировка пропускной способности разомкнутого цикла и разработка к спецификациям запаса по амплитуде и фазе. |
| Closed-Loop Bode Editor | Настройте свой предварительный фильтр, чтобы улучшить отклик системы с обратной связью. | Улучшение отслеживания уставки, входного подавления помех и шумового отклонения. |
| Root Locus Editor | Настройте свой компенсатор, чтобы произвести местоположения полюса с обратной связью, которые удовлетворяют вашим спецификациям проекта. | Проектирование к временному интервалу проектирует спецификации, такие как максимальное перерегулирование и время урегулирования. |
| Nichols Editor | Настройте свой компенсатор, чтобы достигнуть определенного ответа разомкнутого цикла (формирование цикла), комбинируя усиление и информацию о фазе о графике Николса. | Корректировка пропускной способности разомкнутого цикла и разработка к спецификациям запаса по амплитуде и фазе. |
При использовании графической настройки можно изменить компенсатор или непосредственно из графиков редактора или использования редактора компенсатора. Подход общего умысла должен примерно настроить ваш компенсатор с помощью графиков редактора, и затем использовать редактор компенсатора, чтобы подстроить параметры компенсатора. Для получения дополнительной информации смотрите Динамику Компенсатора Редактирования (Control System Toolbox)
Графические настраивающие методы не являются взаимоисключающими. Например, можно настроить компенсатор с помощью и Предвещать редактора и редактора корневого годографа одновременно. Эта опция полезна при разработке и для временного интервала и для спецификаций частотного диапазона.
Для примеров графической настройки смотрите следующее:
Проект диаграммы Боде (Control System Toolbox)
Проект корневого годографа (Control System Toolbox)
Проект графика Николса (Control System Toolbox)
Используйте автоматизированные настраивающие методы, чтобы автоматически настроить компенсаторы на основе ваших спецификаций проекта.
| Настройка метода | Описание | Требования и ограничения |
|---|---|---|
| PID Tuning |
Автоматически настройте коэффициенты ПИД, чтобы сбалансировать производительность и робастность или настроить контроллеры, использующие классические настраивающие формулы ПИДа. |
Классические настраивающие формулы ПИДа требуют устойчивого или объединяющегося эффективного объекта. |
| Optimization Based Tuning |
Оптимизируйте параметры компенсатора с помощью конструктивных требований, заданных в графической настройке и графиках для анализа. |
Программное обеспечение Requires Simulink® Design Optimization™. Настраивает параметры ранее заданной структуры контроллера. |
| LQG Synthesis |
Спроектируйте полный порядок, стабилизирующий контроллер обратной связи как средство отслеживания "линейного квадратичного гауссова" (LQG). |
Максимальный порядок контроллера зависит от эффективной динамики объекта. |
| Loop Shaping |
Найдите полный порядок, стабилизирующий контроллер обратной связи с заданной пропускной способностью разомкнутого цикла или формой. |
Программное обеспечение Requires Robust Control Toolbox™. Максимальный порядок контроллера зависит от эффективной динамики объекта. |
| Internal Model Control (IMC) Tuning |
Получите полный порядок, стабилизирующий контроллер обратной связи, использующий метод разработки IMC. |
Принимает, что ваша система управления использует архитектуру IMC, которая содержит прогнозную модель вашей динамики объекта. Максимальный порядок контроллера зависит от эффективной динамики объекта. |
Подход общего умысла должен сгенерировать начальный компенсатор с помощью настройки ПИДа, синтеза LQG, формирования цикла или настройки IMC. Можно затем улучшать производительность компенсатора с помощью или основанной на оптимизации настройки или графической настройки.
Для получения дополнительной информации об автоматизированных настраивающих методах смотрите, что Компенсатор Проекта Использует Автоматизированные Настраивающие Методы (Control System Toolbox).
Эффективный объект является системой, которой управляет компенсатор, который содержит все элементы разомкнутого цикла в вашей модели кроме компенсатора, который вы настраиваете. Следующие схемы показывают примеры эффективных объектов:
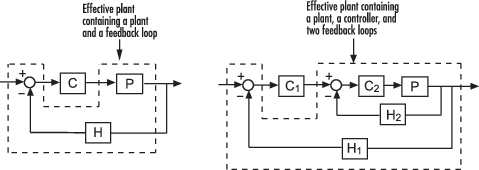
Знание свойств эффективного объекта, замеченного вашим компенсатором, может помочь вам понять, какие настраивающиеся методы работают на вашу систему. Например, некоторые автоматизированные настраивающие методы применяются только к компенсаторам чьи разомкнутые циклы () имейте устойчивые эффективные объекты (). Кроме того, для настройки методов, таких как IMC и формирование цикла, максимальный порядок контроллера зависит от динамики эффективного объекта.
Если компенсатор в вашей модели Simulink имеет ограничения на свои полюса, нули или усиление, вы не можете использовать синтез LQG, формирование цикла или настройку IMC. Например, вы не можете настроить параметры блока PID Controller с помощью этих методов. Если ваше приложение требует ограничений контроллера, используйте альтернативу автоматизированный или графический настраивающий метод.
Кроме того, любые ограничения компенсатора в вашей модели Simulink ограничивают структуру вашего настроенного компенсатора. Например, если вы используете настройку ПИДа, и вы конфигурируете свой блок PID Controller как ПИ-контроллер, ваш настроенный компенсатор должен иметь нулевой производный параметр.
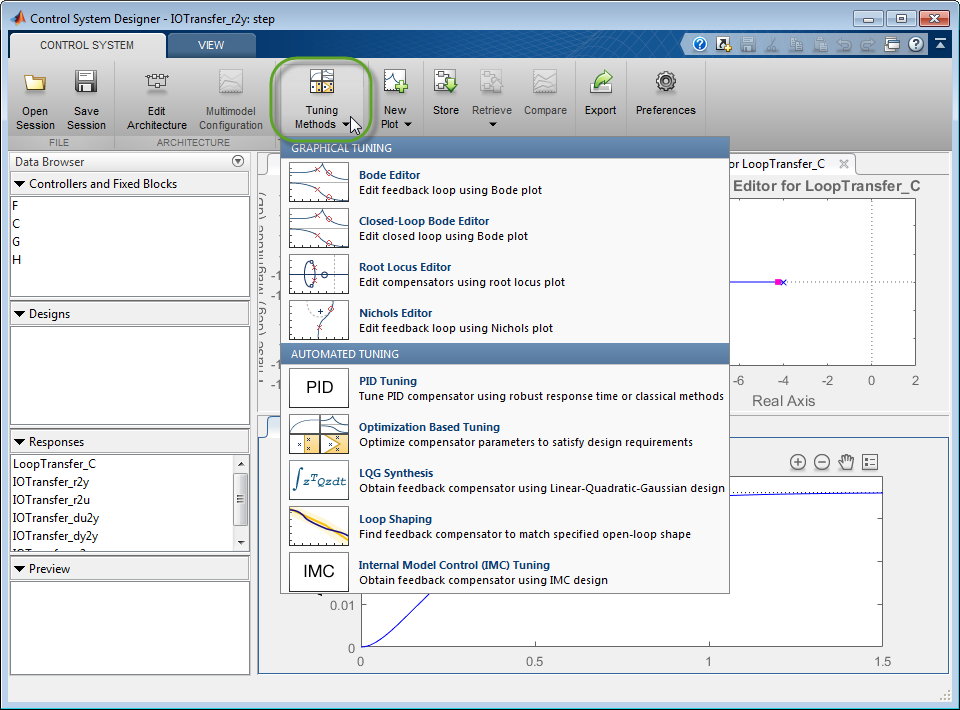
Чтобы выбрать настраивающий метод, в Control System Designer, нажимают Tuning Methods.