ПИД и контроллеры I-PD используются, чтобы смягчить влияние изменений в ссылочном сигнале на управляющем сигнале. Эти контроллеры являются вариантами 2DOF ПИД-регулятор.
Общая формула параллельной формы 2DOF ПИД-регулятор:
Здесь, r и y являются ссылочным входом и измеренным выходом, соответственно. u является контроллером выход, также названный control signal. P, I и D задают пропорциональное, интеграл и производные усиления, соответственно. N задает производный коэффициент фильтра. b и c задают веса заданного значения для пропорциональных и производных компонентов, соответственно. Для 1DOF ПИД, b и c равны 1.
Если r несглажен или прерывист, производные и пропорциональные компоненты могут внести большие скачки или смещения в u, который может быть неосуществимым. Например, вход шага может привести к большому скачку в u из-за производного компонента. Для моторного привода такой агрессивный управляющий сигнал мог повредить двигатель.
Чтобы смягчить влияние r на u, установите b или c или обоих, к 0. Используйте одну из следующих основанных на заданном значении-весом форм:
ПИД (b = 1 и c = 0) — Производный компонент непосредственно не распространяет изменения в r к u, тогда как пропорциональный компонент делает. Однако производный компонент, который оказывает большее влияние, подавлен. Также называемый derivative of output controller.
Общая формула для этой формы контроллера:
I-PD (b = 0 и c = 0) — Пропорциональные и производные компоненты непосредственно не распространяет изменения в r к u.
Общая формула для этой формы контроллера:
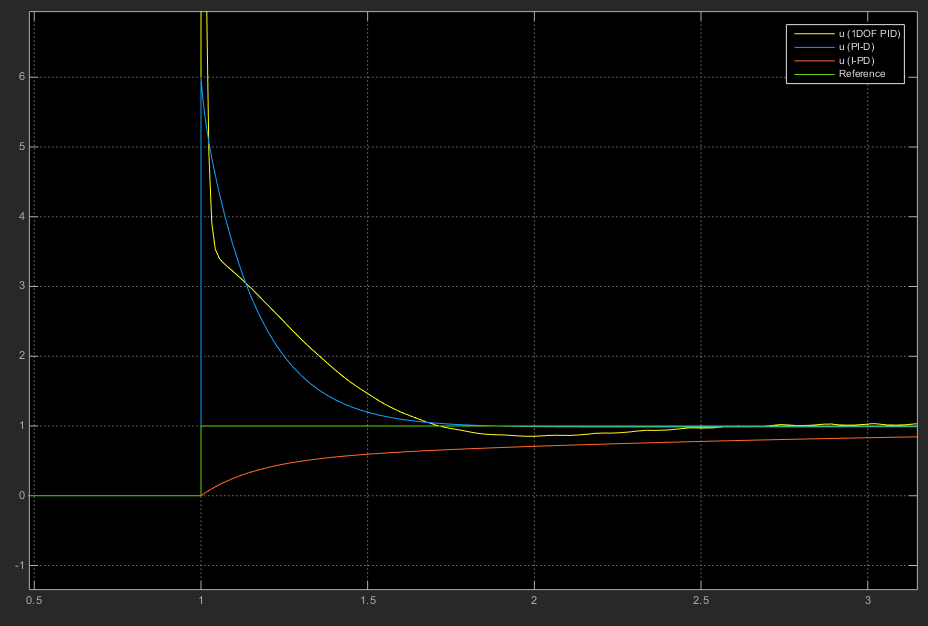
Следующий график показывает u для различных форм ПИДа для ссылки шага. 1DOF ПИД-регулятор приводит к большому скачку, когда ссылка изменяется с 0 до 1. Форма ПИДа приводит к меньшему скачку. В отличие от этого форма I-PD не реагирует так же на изменение в r.
Можно настроить P, I, D и коэффициенты N ПИДа или контроллера I-PD, чтобы достигнуть желаемого подавления помех и отслеживания уставки.
Чтобы задать ПИД или Контроллер I-PD, использующий PID Controller (2DOF) или блоки Discrete PID Controller (2DOF), откройте диалоговое окно блока. В меню Controller выберите PID.
Для ПИД-регулятора введите 1 в поле Setpoint weight (b) и 0 в поле Setpoint weight (c).
Для контроллера I-PD введите 0 в поле Setpoint weight (b) и 0 в поле Setpoint weight (c).
Для примера, который демонстрирует ПИД и контроллер I-PD формы, введите ex_scd_pid2dof_setpoint_based_controllers. Это открывает модель, которая сравнивает производительность 1DOF ПИД, ПИД и контроллер I-PD.
Можно использовать PID Tuner, чтобы автоматически настроить ПИД и контроллеры I-PD при сохранении фиксированного b и значений c. Сделать так:
В модели дважды кликните блок. В диалоговом окне блока, в меню Controller, выбирают PID.
Нажмите Tune. PID Tuner открывается.
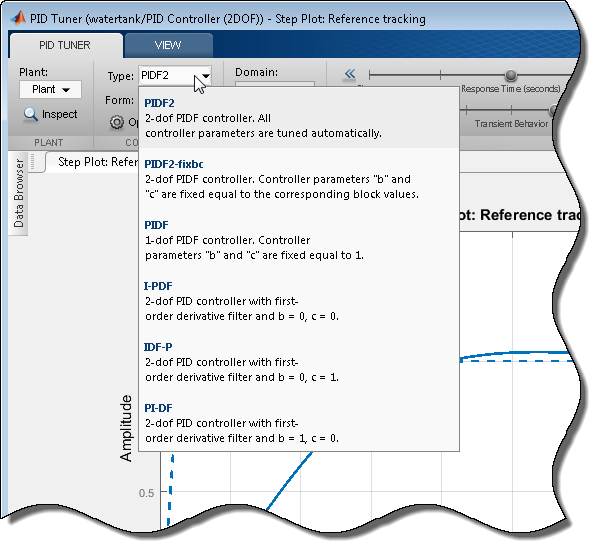
В PID Tuner, в меню Type, выбирают PI-DF или I-PDF. PID Tuner повторно настраивает усиления контроллера, фиксируя b = 1 и c = 0 для ПИДа и b = 0 и c для I-PD.
Можно теперь анализировать отклики системы как описано в, Анализируют Проект в PID Tuner.
Discrete PID Controller (2DOF) | PID Controller (2DOF)
