looptune настраивает обратную связь, проиллюстрированную ниже, чтобы удовлетворить требования по умолчанию или требования, чтобы вы задали.
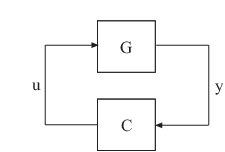
C представляет контроллер и G представляет объект. Датчик выходные параметры y (measurement signals) и привод выходные параметры u (control signals) задает контур между объектом и контроллером. Контроллер является фрагментом вашей системы управления, входные параметры которой являются измерениями, и чьи выходные параметры являются управляющими сигналами. С другой стороны объект является остатком — фрагмент вашей системы управления, которая получает управляющие сигналы как входные параметры и производит измерения как выходные параметры.
Например, в системе управления следующим рисунком, контроллер C получает измерение y, и ссылочный r сигнала. Контроллер производит средства управления qL и qV как выходные параметры.
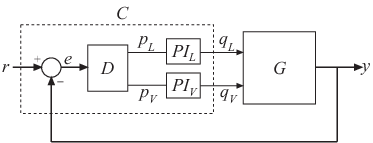
Контроллер C имеет фиксированную внутреннюю структуру. C включает матрицу усиления D , ПИ-контроллеры PI_L и PI_V, и соединение подведения итогов. looptune команда настраивает свободные параметры C такой как усиления в D и пропорциональные и интегральные усиления PI_L и PI_V. Можно также использовать looptune к co-мелодии свободные параметры в обоих C и G.
