Линеаризуйте модель при удалении вклада заданных блоков
lin_fixed = linlft(sys,io,blocks)
[lin_fixed,lin_blocks] = linlft(___)
[___] = linlft(___,opt)
lin_fixed = linlft(sys,io,blocks) линеаризует модель Simulink® под названием sys при удалении вклада определенных блоков. Задайте sys как вектор символов или строка. Задайте полный блок path блоков, чтобы проигнорировать в массиве ячеек из символьных векторов или массиве строк под названием blocks. Линеаризация происходит в рабочей точке, заданной в модели Simulink, которая включает проигнорированные блоки. Можно опционально задать точки линеаризации (линейные аналитические точки) в объекте I/O io. Получившаяся линейная модель lin_fixed имеет эту форму:
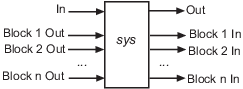
Главные каналы В и соответствуют точкам линеаризации, что вы задаете в объекте I/O io. Остающиеся каналы соответствуют связи с проигнорированными блоками.
Когда вы используете linlft и задайте 'block-by-block' алгоритм линеаризации в linearizeOptions, можно использовать все изменения входных параметров для linearize.
Можно линеаризовать проигнорированные блоки отдельно с помощью linearize, и затем объедините результаты линеаризации с помощью linlftfold.
[lin_fixed,lin_blocks] = linlft(___) возвращает линеаризацию для каждого из блоков, заданных в blocks. Если blocks содержит один блок path, lin_blocks одно пространство состояний (ss) модель. Если blocks массив, идентифицирующий несколько блоков, lin_blocks массив ячеек моделей в пространстве состояний. Полный блок path для каждого блока в lin_blocks хранится в Notes свойство модели в пространстве состояний.
[___] = linlft(___,opt) использует дополнительные опции линеаризации, заданные как linearizeOptions опция установлена.
Линеаризуйте следующие части scdtopmdl Модель Simulink отдельно, и затем комбинирует результаты:
Фиксированный фрагмент, который содержит все кроме модели - ссылки Parameter Varying Controller
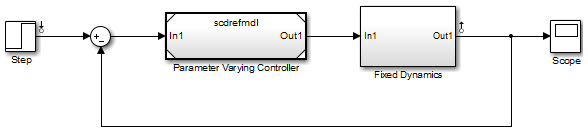
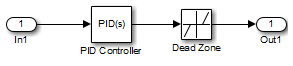
Модель - ссылка Parameter Varying Controller, которая ссылается на scdrefmdl модель
% Open the Simulink model topmdl = 'scdtopmdl'; % Linearize the model without the Parameter Varying Controller io = getlinio(topmdl); blocks = {'scdtopmdl/Parameter Varying Controller'}; sys_fixed = linlft(topmdl,io,blocks); % Linearize the Parameter Varying Controller refmdl = 'scdrefmdl'; sys_pv = linearize(refmdl); % Combine the results BlockSubs(1) = struct('Name',blocks{1},'Value',sys_pv); sys_fold = linlftfold(sys_fixed,BlockSubs);
getlinio | linearize | linearizeOptions | linio | linlftfold | operpoint
