Active Differential
Шпора или планетарный активный дифференциал
Описание
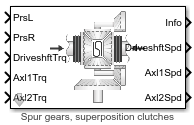
Блок Active Differential реализует активный дифференциал, чтобы составлять передачу степени от передачи до осей. Блок моделирует активный дифференциал как открытый дифференциал, связанный или с цилиндрическим или с планетарным набором дифференциала. Блок использует внешние сигналы давления отрегулировать давление муфты, чтобы или убыстриться или замедлить каждое вращение оси.
Используйте блок в оборудовании в цикле (HIL) и рабочих процессах оптимизации, чтобы динамически связать карданный вал с осями колеса, когда это необходимо, чтобы направить крутящий момент передачи к определенной оси. Для подробных передних исследований управления колеса используйте блок, чтобы связать карданный вал с универсальными соединениями. Блок подходит, чтобы использовать в уровне системы исследования управления с обратной связью, например, устойчивость отклонения от курса и векторизацию крутящего момента. Все параметры являются настраиваемыми.
Чтобы задать активный дифференциал, откройте параметры Active Differential и задайте Active differential type.
Установка | Блокируйте реализацию |
|---|
Spur gears, superposition clutches | Муфты находятся в суперпозиции через систему механизма с тремя бандами и дифференциальный случай |
Double planetary gears, stationary clutches | Муфты фиксируются поставщику услуг и осям через двойные планетарные наборы механизма |
Используйте параметр Open Differential Crown wheel (ring gear) located, чтобы задать открывать дифференциальное отделение, любого налево или направо от средней линии.
В зависимости от доступных данных, чтобы задать метод, чтобы связать различные крутящие моменты применился к осям, используйте параметр Slip Coupling Coupling type.
Установка | Блокируйте реализацию |
|---|
Pre-loaded ideal clutch | Крутящий момент, смоделированный как сухая муфта с постоянными коэффициентами трения |
Slip speed dependent torque data | Крутящий момент определил из интерполяционной таблицы, которая является функцией давления муфты и скорости промаха |
Блок Active Differential не включает контроллер или внешнюю динамику привода муфты. Используйте эту информацию, чтобы контролировать входное давление муфты. Информационная шина содержит скорости промаха в муфте 1, Δωcl1 и муфта 2, Δωcl2.
Введите крутящий момент оси | Δωcl1 | Δωcl2 | Введите давление муфты |
|---|
Положительная ось 1 крутящий момент | > 0 | Нет данных | Увеличьте муфту 1 давление |
Положительная ось 1 крутящий момент | < 0 | Нет данных | Расцепите муфту 1 и 2 |
Положительная ось 2 крутящих момента | Нет данных | > 0 | Увеличьте муфту 1 давление |
Положительная ось 2 крутящих момента | Нет данных | < 0 | Расцепите муфту 1 и 2 |
Дифференциалы
Блок Active Differential реализует эти уравнения, чтобы представлять механический динамический ответ для суперпозиции и стационарных настроек муфты. Чтобы определить передаточные отношения, блок использует скорость муфты и количество зубов для каждой пары механизма. Допустимое различие в скорости колеса (AWSD) ограничивает различие в скорости колеса для положительного крутящего момента.
Механический динамический ответ | Уравнения |
|---|
Муфты суперпозиции и цилиндрический левередж | Стационарные муфты и планетарный левередж |
|---|
Коронуйте механизм |
|
|
Ось 1 |
|
|
Ось 2 |
|
|
Передаточные отношения |
|
|
Ограничения жесткого соединения |
|
|
Допустимое различие в скорости колеса (AWSD) |
|
|
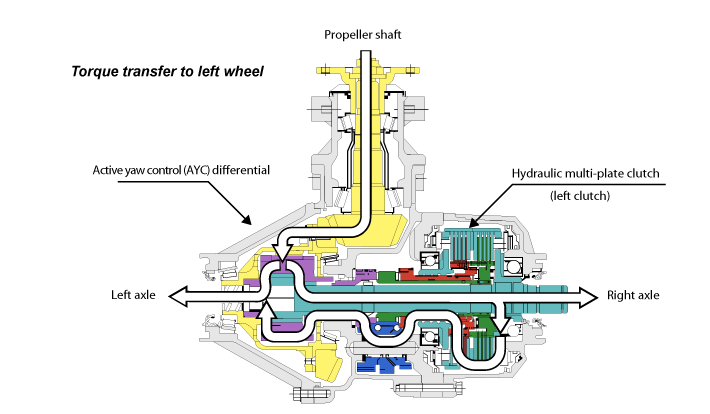
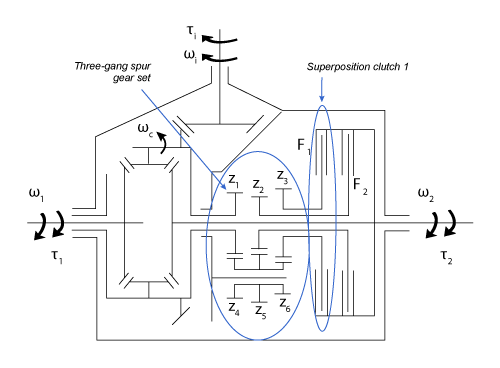
Муфты суперпозиции и цилиндрический левередж
Эти рисунки муфты суперпозиции показывают, что настройка муфты и схематичный для крутящего момента передает левому колесу.
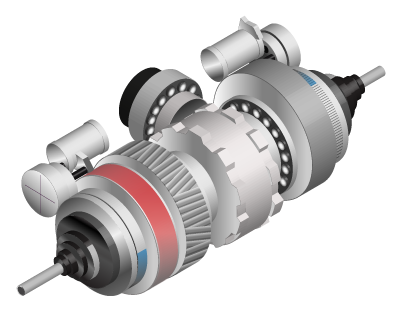
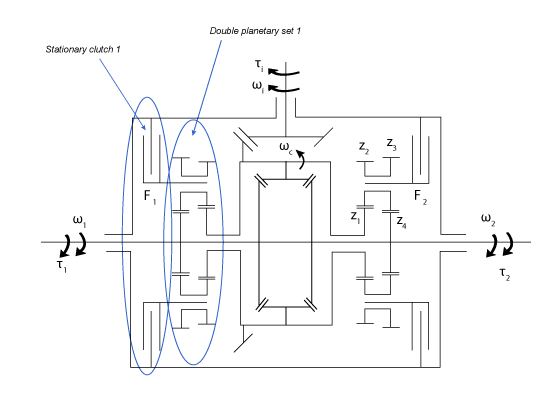
Стационарные муфты и планетарный левередж
Рисунки показывают стационарную настройку муфты и схематичный.
Подсуньте связь
И для идеальной муфты и для настроек скорости промаха, связь промаха является функцией давления муфты и скорости промаха. Скорость промаха зависит от скорости промаха в каждом из интерфейсов муфты.
Идеальная муфта
Идеальная модель связи муфты использует скорость промаха оси, давление муфты и трение, чтобы вычислить крутящий момент муфты. Коэффициент трения является функцией скорости промаха.
Чтобы вычислить общую силу муфты, блок использует эффективный радиус, давление муфты и усилие предварительной нагрузки муфты.
Радиусы диска определяют эффективный радиус муфты, по которому действует сила муфты.
Скорость промаха
Чтобы вычислить крутящий момент муфты, модель связи скорости промаха использует данные о крутящем моменте, которые являются функцией скорости промаха и давления муфты. Скорости вращения осей определяют скорость промаха.
Уравнения используют эти переменные.
| Aeff | Эффективная область давления муфты |
| bd | Коронуйте механизм линейное вязкое затухание |
| b1, b2 | Ось 1 и 2 линейных вязких затухания, соответственно |
| Fc, FT | Сожмите усилие предварительной нагрузки и общую силу, соответственно |
| Jd | Поставщик услуг вращательная инерция |
| Jgc | Механизм с тремя бандами вращательная инерция |
| Jc1, Jc2 | Планетарный поставщик услуг 1 и 2 вращательной инерции, соответственно |
| Jr1, Jr2 | Планетарный кольцевой механизм 1 и 2 вращательной инерции, соответственно |
| Js1, Js2 | Планетарный механизм солнца 1 и 2 вращательной инерции, соответственно |
| J1, J2 | Ось 1 и 2 вращательной инерции, соответственно |
| N | Передаточное отношение поставщика услуг к карданному валу |
| Nd | Количество дисков |
| Ns1, Ns2 | Сожмите 1 и 2 передаточных отношения поставщика услуг к шпоре, соответственно |
| Np1, Np2 | Планетарное 1 и 2 передаточных отношения поставщика услуг к оси, соответственно |
| P1, P2 | Сожмите 1 и 2 давления, соответственно |
| Reff | Эффективный радиус муфты |
| Ri, Ro | Кольцевой диск внутренний и внешний радиус, соответственно |
| Tc | Сожмите крутящий момент |
| Tcl1, Tcl2 | Сожмите 1 и 2 связывающихся крутящих момента, соответственно |
| Td | Крутящий момент карданного вала |
| T1, T2 | Ось 1 и 2 крутящих момента, соответственно |
| Ti | Ось внутренний крутящий момент сопротивления |
| Ti1, Ti2 | Ось 1 и 2 внутренних крутящих момента сопротивления |
| ωd | Скорость вращения карданного вала |
| ϖ | Подсуньте скорость |
| ω1, ω2 | Ось 1 и 2 скорости вращения, соответственно |
Δωcl1, Δωcl2 | Сожмите 1 и 2 скорости промаха в интерфейсе, соответственно |
ωcl1, ωcl2 | Сожмите 1 и 2 скорости вращения, соответственно |
| μ | Сожмите коэффициент трения |
| zi | Количество зубов на механизме i |
Порты
Входные параметры
развернуть все
Prs1 — Сожмите 1 давление
scalar
Сожмите 1 давление, P1, в Па.
Prs2 — Сожмите 2 давления
scalar
Сожмите 2 давления, P2, в Па.
DriveshftTrq — Крутящий момент карданного вала
scalar
Примененный входной крутящий момент, Td, обычно от карданного вала механизма, в N · m.
Axl1Trq — Крутящий момент
scalar
Ось 1 крутящий момент, T1, в N · m.
Axl2Trq — Крутящий момент
scalar
Ось 2 крутящих момента, T2, в N · m.
Вывод
развернуть все
Info — Сигнал шины
шина
Сигнал шины, содержащий эти вычисления блока.
| Сигнал | Описание | Модули |
|---|
Driveshft
| DriveshftTrq
| Крутящий момент карданного вала | N· |
DriveshftSpd
| Скорость вращения карданного вала | rad/s |
Axl1
| Axl1Trq
| Ось 1 крутящий момент | N· |
Axl1Spd
| Ось 1 скорость вращения | rad/s |
Axl2
| Axl2Trq
| Ось 2 крутящих момента | N· |
Axl2Spd
| Ось 2 скорости вращения | rad/s |
Cplng
| CplngTrq1
| Сожмите 1 связывающийся крутящий момент | N· |
CplngTrq2
| Сожмите 2 связывающихся крутящих момента | N· |
CplngSlipSpd1 | Сожмите 1 скорость промаха | rad/s |
CplngSlipSpd2 | Сожмите 2 скорости промаха | rad/s |
CplngPrs1 | Сожмите 1 входное давление | Па |
CplngPrs2 | Сожмите 2 входных давления | Па |
DriveshftSpd — Скорость вращения
scalar
Скорость вращения карданного вала, ωd, в rad/s.
Axl1Spd — Скорость вращения
scalar
Ось 1 скорость вращения, ω1, в rad/s.
Axl2Spd — Скорость вращения
scalar
Ось 2 скорости вращения, ω2, в rad/s.
Параметры
развернуть все
Активный дифференциал
Active differential type — Дифференциал
Spur gears, superposition clutches (значение по умолчанию) | Double planetary gears, stationary clutches
Задайте тип активного дифференциала.
Установка | Блокируйте реализацию |
|---|
Spur gears, superposition clutches | Муфты находятся в суперпозиции через систему механизма с тремя бандами и дифференциальный случай |
Double planetary gears, stationary clutches | Муфты фиксируются поставщику услуг и осям через двойные планетарные наборы механизма |
Clutch 1 to differential case gear ratio, Ns1 — Сожмите передаточное отношение с 1 шпорой
scalar
Сожмите 1 поставщику услуг цилиндрическое передаточное отношение, Ns1, безразмерный.
Зависимости
Чтобы включить цилиндрические параметры механизма, выберите Spur gears, superposition clutches для параметра Active differential type.
Clutch 2 to differential case gear ratio, Ns2 — Сожмите передаточное отношение с 2 шпорами
scalar
Сожмите 2 поставщику услуг цилиндрических передаточных отношения, Ns2, безразмерный.
Зависимости
Чтобы включить цилиндрические параметры механизма, выберите Spur gears, superposition clutches для параметра Active differential type.
Three-gang gear inertia, Jgc — Вращательная инерция
scalar
Механизм с тремя бандами вращательная инерция, Jgc, в kg · м^2.
Зависимости
Чтобы включить цилиндрические параметры механизма, выберите Spur gears, superposition clutches для параметра Active differential type.
Axle 1 planetary carrier to axle gear ratio, Np1 — Планетарное 1 передаточное отношение поставщика услуг
scalar
Планетарное 1 передаточное отношение поставщика услуг к оси, Np1, безразмерный.
Зависимости
Чтобы включить планетарные параметры механизма, выберите Double planetary gears, stationary clutches для параметра Active differential type.
Axle 1 sun gear inertia, Js1 — Планетарная 1 инерция механизма солнца
scalar
Планетарная 1 инерция механизма солнца, Js1, в kg · м^2.
Зависимости
Чтобы включить планетарные параметры механизма, выберите Double planetary gears, stationary clutches для параметра Active differential type.
Axle 1 carrier inertia, Jc1 — Планетарная 1 инерция поставщика услуг
scalar
Планетарная 1 инерция поставщика услуг, Jc1, в kg · м^2.
Зависимости
Чтобы включить планетарные параметры механизма, выберите Double planetary gears, stationary clutches для параметра Active differential type.
Axle 1 ring inertia, Jr1 — Планетарная 1 кольцевая инерция механизма
scalar
Планетарная 1 кольцевая инерция механизма, Jr1, kg · м^2.
Зависимости
Чтобы включить планетарные параметры механизма, выберите Double planetary gears, stationary clutches для параметра Active differential type.
Axle 2 planetary carrier to axle gear ratio, Np2 — Планетарные 2 передаточных отношения поставщика услуг
scalar
Планетарные 2 передаточных отношения поставщика услуг к оси, Np2, безразмерный.
Зависимости
Чтобы включить планетарные параметры механизма, выберите Double planetary gears, stationary clutches для параметра Active differential type.
Axle 2 sun gear inertia, Js2 — Планетарные 2 инерции механизма солнца
scalar
Планетарные 2 инерции механизма солнца, Js2, в kg · м^2.
Зависимости
Чтобы включить планетарные параметры механизма, выберите Double planetary gears, stationary clutches для параметра Active differential type.
Axle 2 carrier inertia, Jc2 — Планетарные 2 инерции поставщика услуг
scalar
Планетарные 2 инерции поставщика услуг, Jc2, в kg · м^2.
Зависимости
Чтобы включить планетарные параметры механизма, выберите Double planetary gears, stationary clutches для параметра Active differential type.
Axle 2 ring inertia, Jr2 — Планетарные 2 кольцевой инерции механизма
scalar
Планетарные 2 кольцевой инерции механизма, Jr2, в kg · м^2.
Зависимости
Чтобы включить планетарные параметры механизма, выберите Double planetary gears, stationary clutches для параметра Active differential type.
Открытый дифференциал
Crown wheel (ring gear) located — Задайте связь колеса короны
To the left of center-line (значение по умолчанию) | To the right of center-line
Задайте связь колеса короны с карданным валом.
Carrier to drive shaft ratio, NC/ND — Отношение
scalar
Передаточное отношение поставщика услуг к карданному валу, N.
Carrier inertia, Jd — Инерция
scalar
Вращательная инерция блока механизма короны, Jd, в kg · м^2. Можно включать инерцию карданного вала.
Carrier damping, bd — Затухание
scalar
Коронуйте механизм линейное вязкое затухание, bd, в N · m·.
Axle 1 inertia, Jw1 — Инерция
scalar
Ось 1 вращательная инерция, J1, в kg · м^2.
Axle 1 damping, bw1 — Затухание
scalar
Ось 1 линейное вязкое затухание, b1, в N · m·.
Axle 2 inertia, Jw2 — Инерция
scalar
Ось 2 вращательной инерции, J2, в kg · м^2.
Axle 2 damping, bw2 — Затухание
scalar
Ось 2 линейных вязких затухания, b2, в N · m·.
Axle 1 initial velocity, omegaw1o — Скорость вращения
scalar
Ось 1 начальная скорость, ωo1, в rad/s.
Axle 2 initial velocity, omegaw2o — Скорость вращения
scalar
Ось 2 начальных скорости, ωo2, в rad/s.
Подсуньте связь
Coupling type — Закрутите связь
Ideal pre-loaded clutch (значение по умолчанию) | Slip speed dependent torque data | Input torque dependent torque data
Задайте тип связи крутящего момента.
Установка | Блокируйте реализацию |
|---|
Pre-loaded ideal clutch | Крутящий момент, смоделированный как влажная муфта с постоянной скоростью |
Slip speed dependent torque data | Крутящий момент определил из интерполяционной таблицы, которая является функцией давления муфты и скорости промаха |
Effective applied pressure area — Область Pressure
scalar
Эффективная прикладная область давления, в N/m^2.
Зависимости
Чтобы включить параметры муфты, выберите Ideal pre-loaded clutch для параметра Coupling type.
Number of disks, Ndisks — Закрутите связь
scalar
Количество дисков.
Зависимости
Чтобы включить параметры муфты, выберите Ideal pre-loaded clutch для параметра Coupling type.
Effective radius, Reff — Радиус
scalar
Эффективный радиус, , используемый с прикладывавшей силой трения муфты, чтобы определить силу трения. Эффективный радиус задан как:
Уравнение использует эти переменные.
| Кольцевой диск внешний радиус |
| Кольцевой диск внутренний радиус |
Зависимости
Чтобы включить параметры муфты, выберите Ideal pre-loaded clutch для параметра Coupling type.
Nominal preload force, Fc Сила
scalar
Номинальное усилие предварительной нагрузки, в N.
Зависимости
Чтобы включить параметры муфты, выберите Ideal pre-loaded clutch для параметра Coupling type.
Friction coefficient vector, mu — Трение
vector
Вектор коэффициентов трения.
Зависимости
Чтобы включить параметры муфты, выберите Ideal pre-loaded clutch для параметра Coupling type.
Slip speed vector, dw — Скорость вращения
vector
Подсуньте вектор скорости в rad/s.
Чтобы включить параметры муфты, выберите Ideal pre-loaded clutch для параметра Coupling type.
Torque - slip speed matrix, TdPdw — Сожмите крутящий момент
array
Матрица крутящего момента, Tc, в N · m.
Зависимости
Чтобы включить параметры скорости промаха, выберите Slip speed dependent torque data для параметра Coupling type.
Clutch pressure vector, pT — Сожмите точки останова давления
vector
Сожмите вектор точек останова давления, P1,2, в Па.
Зависимости
Чтобы включить параметры скорости промаха, выберите Slip speed dependent torque data для параметра Coupling type.
Slip speed vector, dwT — Подсуньте точки останова скорости
vector
Подсуньте вектор точек останова скорости, ω, в rad/s.
Зависимости
Чтобы включить параметры скорости промаха, выберите Slip speed dependent torque data для параметра Coupling type.
Coupling time constant, tauC — Постоянный
scalar
Связь постоянной времени, в s.
Ссылки
[1] Deur, J., Ivanović, V., Хэнкок, M. и Assadian, F. "Моделирование Активной Дифференциальной Динамики". В продолжениях ASME. Системы транспортировки. Издание 17, стр: 427-436.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Введенный в R2018b