Реализуйте три уравнения степеней свободы движения пользовательской переменной массы относительно осей тела
Уравнения Motion/3DOF
Блок Custom Variable Mass 3DOF (Body Axes) рассматривает вращение в вертикальной плоскости зафиксированной телом координатной системы координат о плоской Наземной системе координат.
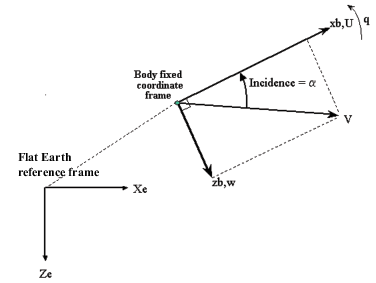
Уравнения движения
где приложенные силы приняты, чтобы действовать в центре тяжести тела. Ure b и Wre b являются относительными скоростями массового потока () быть добавленным к или извлеченный от тела в зафиксированных телом осях.
Задает модули ввода и вывода:
Модули | Силы | Момент | Ускорение | Скорость | Положение | Масса | Инерция |
|---|---|---|---|---|---|---|---|
| Ньютон | Ньютон-метр | Метры в секунду придали квадратную форму | Метры в секунду | Метры | Килограмм | Килограммометр придал квадратную форму |
| Фунт | Фунт ноги | Ноги в секунду придали квадратную форму | Ноги в секунду | Футы | Краткий заголовок | Отложите нога придала квадратную форму |
| Фунт | Фунт ноги | Ноги в секунду придали квадратную форму | Узлы | Футы | Краткий заголовок | Отложите нога придала квадратную форму |
Выберите тип массы, чтобы использовать:
| Масса является постоянной в течение симуляции. |
| Масса и инерция варьируются линейно как функция массового уровня. |
| Масса и изменения инерции настраиваемы. |
Custom Variable выбор соответствует ранее описанным уравнениям движения.
Скалярное значение для начальной скорости тела, (V 0).
Скалярное значение для начального отношения подачи тела, (θ 0).
Скалярное значение для начального угла между вектором скорости и телом, (α 0).
Скалярное значение для начального уровня вращения тела, (q 0).
Двухэлементный вектор, содержащий начальное местоположение тела в плоской Наземной системе координат.
Задайте источник силы тяжести:
| Переменный вход силы тяжести, чтобы блокироваться |
| Постоянная сила тяжести задана в Acceleration due to gravity |
Скалярное значение для ускорения из-за силы тяжести использовало, если внутренний источник силы тяжести выбран. Если силой тяжести нужно пропустить в симуляции, это значение может быть установлено к 0. Этот параметр появляется, если вы устанавливаете Gravity source на Internal.
Установите этот флажок, чтобы добавить массовый скоростной порт родственника потока. Это - относительная скорость, при которой масса аккумулируется или удаляется.
Установите этот флажок, чтобы включить дополнительный выходной порт для ускорений в зафиксированных телом осях относительно инерционной системы координат. Вы обычно соединяете этот сигнал с акселерометром.
Присвойте уникальное имя каждому состоянию. Можно использовать имена состояния вместо путей к блоку во время линеаризации.
Чтобы присвоить имя к одному состоянию, введите уникальное имя между кавычками, например, 'velocity'.
Чтобы присвоить имена к нескольким состояниям, введите разграниченный запятой список, окруженный фигурными скобками, например, {'a', 'b', 'c'}. Каждое имя должно быть уникальным.
Если параметр пуст (' '), никакое присвоение имени не происходит.
Имена состояния применяются только к выбранному блоку параметром имени.
Количество состояний должно разделиться равномерно среди количества имен состояния.
Можно задать меньше имен, чем состояния, но вы не можете задать больше имен, чем состояния.
Например, можно задать два имени в системе с четырьмя состояниями. Имя применяется к первым двум состояниям и второму имени к последним двум состояниям.
Чтобы присвоить имена состояния с переменной в рабочей области MATLAB®, введите переменную без кавычек. Переменная может быть вектором символов, массивом ячеек или структурой.
Задайте скоростные имена состояния.
Значением по умолчанию является ''.
Задайте имя состояния отношения подачи.
Значением по умолчанию является ''.
Задайте имена состояния положения.
Значением по умолчанию является ''.
Задайте подачу угловое имя состояния уровня.
Значением по умолчанию является ''.
| Входной параметр | Тип размерности | Описание |
|---|---|---|
| Сначала | Скаляр | Содержит силу, действующую вдоль тела x - ось, (Fx). |
| Второй | Скаляр | Содержит силу, действующую вдоль тела z - ось, (Fz). |
| Треть | Скаляр | Содержит прикладной момент подачи, (M). |
| Четвертый (Необязательно) | Вектор | Содержит скорость изменения массы, () (положительный, если аккумулируется, отрицательный, если удалено). |
| Пятый | Скаляр | Содержит массу, (m). |
| Шестой | Скаляр | Содержит скорость изменения матрицы тензора инерции, . |
| Седьмой | Скаляр | Содержит матрицу тензора инерции, (Iyy). |
| Восьмой (Необязательно) | Скаляр | Содержит силу тяжести в выбранных модулях. |
Девятый (Необязательно) | Двухэлементный вектор | Содержит одну или несколько относительных скоростей, при которых масса аккумулируется к или удаляется от тела в осях тела. |
| Вывод | Тип размерности | Описание |
|---|---|---|
| Сначала | Скаляр | Содержит отношение подачи, в ±pi, в радианах (θ). |
| Второй | Скаляр | Содержит подачу угловой уровень, в радианах в секунду (q). |
| Треть | Скаляр | Содержит подачу, которой в секунду придало квадратную форму угловое ускорение, в радианах . |
| Четвертый | Двухэлементный вектор | Содержит местоположение тела, в плоской Наземной системе координат, (Xe, Ze). |
| Пятый | Двухэлементный вектор | Содержит скорость тела, разрешенного в зафиксированную телом координатную систему координат, (u, w). |
| Шестой | Двухэлементный вектор | Содержит ускорение тела, разрешенного в зафиксированную телом координатную систему координат, (Ax, Az). |
| Седьмой (Необязательно) | Двухэлементный вектор | Содержит ускорения в зафиксированных телом осях относительно инерционной системы координат (плоская Земля). Вы обычно соединяете этот сигнал с акселерометром. |
