Стандарт AUTOSAR задает изменения программной архитектуры под названием AUTOSAR platforms: Классическая платформа (CP) и Адаптивная платформа (AP).
Когда вы выберете, который платформа использовать в разработке и реализации компонента программного обеспечения AUTOSAR, рассмотрите информацию в этой таблице для руководства.
Сравнение платформы AUTOSAR
| Цель или функция | Классическая платформа | Адаптивная платформа |
|---|---|---|
| Варианты использования | Встраиваемые системы | Высокоэффективное вычисление, связь с внешними ресурсами и гибкое развертывание |
| Язык программирования | C | C++ |
| Операционная система | Несмонтированная плата | POSIX |
| Требования в реальном времени | Трудно | Мягкий |
| Вычислительная мощность | Низко | Высоко |
| Коммуникация | Основанный на сигнале | Основанный на событии, для обслуживания широкого круга запросов |
| Безопасность | Поддерживаемый | Поддерживаемый |
| Динамическое обновление | Не доступный | Поэтапное развертывание и изменения конфигурации во время выполнения |
| Уровень стандартизации | Высоко — подробные спецификации | Низко — API и семантика |
| Гибкая разработка | Нет | Да |
Классическая Платформа удовлетворяет требования очень встроенных электронных блоков управления (ЭКЮ), которые управляют электрическими выходными сигналами на основе входных сигналов и информации от других ЭКЮ, соединенных с сетью транспортного средства. Как правило, вы разработка и реализация программное обеспечение управления для определенного типа транспортного средства, которое не изменяется в течение времени жизни транспортного средства.
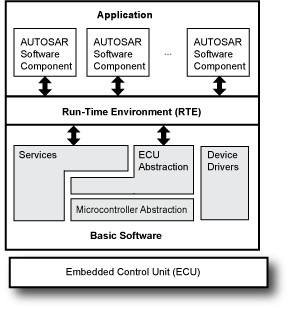
Слой Run-Time Environment (RTE) программной архитектуры обрабатывает связь между компонентами программного обеспечения AUTOSAR на Прикладном уровне и между компонентами программного обеспечения AUTOSAR и услугами, предоставленными Основным Программным слоем. Основной Программный слой состоит из:
Сервисы, такие как система, память и коммуникационные услуги
Драйверы устройств
Абстракция ECU
Абстракция микроконтроллера
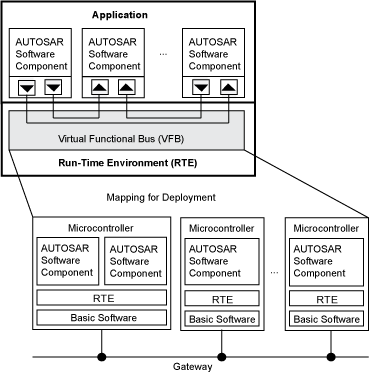
Классическая Платформа использует виртуальную функциональную шину (VFB), чтобы поддержать аппаратно-независимую разработку и использование прикладного программного обеспечения AUTOSAR. Шина состоит из абстрактных представлений RTEs за определенные ЭКЮ, разъединяя компоненты программного обеспечения AUTOSAR на Прикладном уровне архитектуры от инфраструктуры архитектуры. Компоненты программного обеспечения AUTOSAR и шина связываются при помощи выделенных портов. Вы конфигурируете приложение путем отображения портов компонента с представлениями RTE системных ЭКЮ.
Адаптивная Платформа является распределенными вычислениями и архитектурой для обслуживания широкого круга запросов (SOA). Платформа обеспечивает высокоэффективное вычисление, основанные на сообщении коммуникационные механизмы и гибкую настройку программного обеспечения для других приложений, такой, как автоматизировано системы развлекательно-информационной передачи и управление. Программное обеспечение на основе этой платформы может:
Встретьте строгой целостности и требованиям к защите
Обратитесь к восприятию среды и поведенческому планированию ответа
Интегрируйте транспортное средство в бэкэнд или инфраструктуру внешней системы
Обратитесь к изменениям во внешних системах, потому что можно обновить программное обеспечение в течение времени жизни транспортного средства
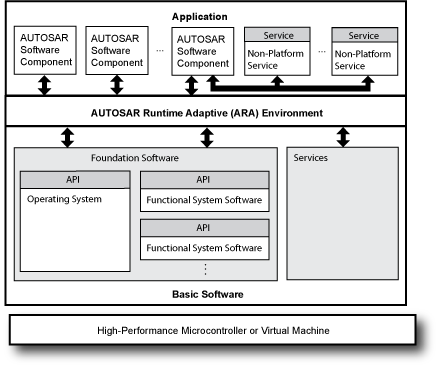
Слой RTE программной архитектуры включает библиотеку стандарта C++. Это поддерживает связь между компонентами программного обеспечения AUTOSAR на Прикладном уровне и между компонентами программного обеспечения AUTOSAR и программным обеспечением, предоставленным Основным Программным слоем. Основной Программный слой состоит из системного базового программного обеспечения и сервисов. Компоненты программного обеспечения AUTOSAR на Прикладном уровне связываются друг с другом с сервисами неплатформы, и с базовым программным обеспечением и сервисами путем ответа на событийно-управляемые сообщения. Компоненты программного обеспечения взаимодействуют с программным обеспечением в Основном Программном слое при помощи интерфейсов программирования приложения C++ (API).
Базовое программное обеспечение включает операционную систему POSIX и программное обеспечение для задач управления системой, таких как:
Управление выполнением
Коммуникационное управление
Синхронизация времени
Единичное управление доступом
Логгирование и трассировка
Примеры сервисов включают:
Обновление и управление конфигурацией
Диагностика
Отображение сигнала к сервису
Сетевое управление
Оборудование ECU, на котором одним экземпляром Адаптивного Платформенного приложения запуски является machine. Машина может быть одними или несколькими микросхемами или компонентом виртуального аппаратного обеспечения. Оборудование может быть однокристальной схемой, которая размещает одну или несколько машин или несколько микросхем, которые размещают одну машину.
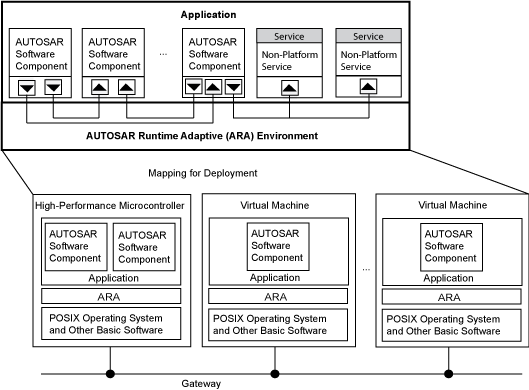
Адаптивная Поддержка платформ аппаратно-независимая разработка и использование прикладного программного обеспечения AUTOSAR. Абстрактные представления RTEs за определенные ЭКЮ (микроконтроллеры, высокоэффективные микроконтроллеры и виртуальные машины) разъединяют компоненты программного обеспечения AUTOSAR на Прикладном уровне архитектуры от инфраструктуры архитектуры. Компоненты программного обеспечения AUTOSAR и базовое программное обеспечение и сервисы связываются при помощи выделенных портов. Вы конфигурируете приложение путем отображения портов компонента с представлениями RTE системных ЭКЮ.