В этом примере показано, как использовать PID Tuner, чтобы спроектировать контроллер для объекта:
Конструктивные требования для системы замкнутого цикла, чтобы отследить ссылочный вход со временем нарастания меньше чем 1,5 с и время урегулирования меньше чем 6 с.
В этом примере вы представляете объект как модель LTI. Для получения информации об использовании PID Tuner, чтобы настроить блок PID Controller в модели Simulink®, смотрите ПИД-регулятор Мелодии, чтобы Способствовать Отслеживанию уставки или Подавлению помех (Simulink Control Design).
Создайте модель объекта управления и откройте PID Tuner, чтобы спроектировать ПИ-контроллер для первого проекта передачи.
sys = zpk([],[-1 -1 -1],1); pidTuner(sys,'pi')
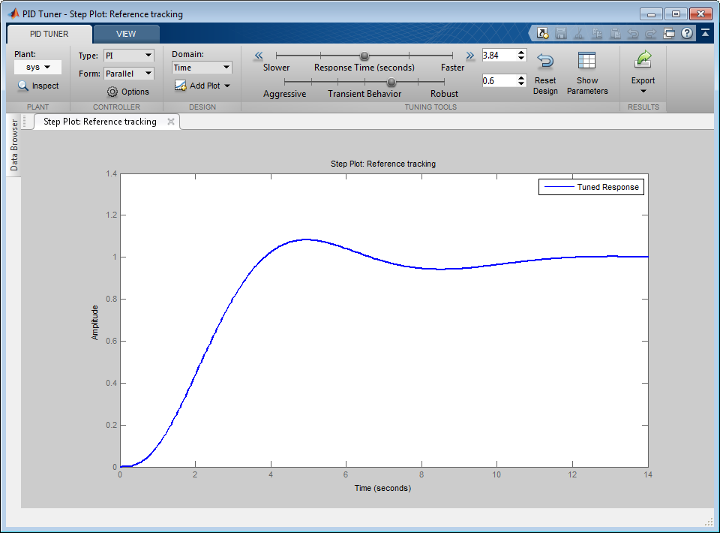
Когда вы открываете PID Tuner, он автоматически проектирует контроллер типа, который вы задаете (здесь, PI). Контроллер спроектирован для баланса между производительностью (время отклика) и робастностью (запасы устойчивости). PID Tuner отображает переходной процесс с обратной связью системы со спроектированным контроллером.
Можно также открыть PID Tuner с рабочего стола MATLAB® во вкладке Apps. Когда вы сделаете так, используйте меню Plant в PID Tuner, чтобы задать вашу модель объекта управления.
Исследуйте время нарастания отслеживания уставки и время урегулирования.
Щелкните правой кнопкой по графику и выберите Characteristics > Rise Time отметить время нарастания как синяя точка на графике. Выберите Characteristics > Settling Time отметить время урегулирования. Чтобы видеть подсказки с численными значениями, кликните по каждой из синих точек.

Первоначальный проект ПИ-контроллера обеспечивает время нарастания 2,35 с и время урегулирования 10,7 с. Оба результата медленнее, чем конструктивные требования.
Чтобы отобразить показатели производительности в таблице вместо в подсказках на графике, нажмите Show parameters. Это действие открывает отображение, содержащее производительность и метрики робастности и настроенные усиления контроллера.
Двигайте ползунок Response time к праву попытаться улучшать производительность цикла. График отклика автоматически обновляется с новым проектом.

Перемещение ползунка Response time достаточно далеко, чтобы удовлетворить требование времени нарастания меньше чем 1,5 с приводит к большему количеству колебания. Кроме того, отображение параметров показывает, что новый ответ имеет неприемлемо длинное время урегулирования.

Чтобы достигнуть более быстрой скорости ответа, алгоритм должен пожертвовать устойчивостью.
Измените тип контроллера, чтобы улучшить ответ.
Добавление производного действия контроллеру дает PID Tuner больше свободы достигнуть соответствующего запаса по фазе с желаемой скоростью ответа.
В меню Type выберите PIDF. PID Tuner проектирует новый контроллер PIDF. (См. Тип ПИД-регулятора для получения дополнительной информации о доступных типах контроллера.)

Время нарастания и время урегулирования теперь соответствуют конструктивным требованиям. Можно использовать ползунок Response time, чтобы внести дальнейшие корректировки в ответ. Чтобы вернуться к значению по умолчанию, автоматизированному, настраивая результат, нажмите Reset Design.
Чтобы настроить полосу пропускания замкнутой системы вместо времени отклика, выберите Frequency domain в меню Design mode. Пропускная способность обратно пропорциональна времени отклика.
Анализируйте другие отклики системы, в подходящих случаях.
Чтобы анализировать другие отклики системы, нажмите Add Plot. Выберите отклик системы, который вы хотите анализировать.
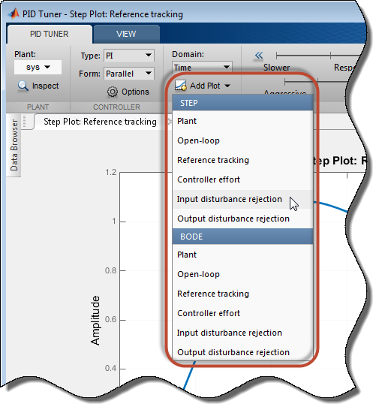
Например, чтобы наблюдать переходной процесс с обратной связью к воздействию во входе объекта, в разделе Step меню Add Plot, выбирают Input disturbance rejection. Ответ подавления помех появляется в новой фигуре.

Смотрите Анализируют Проект в PID Tuner для получения дополнительной информации о доступных графиках отклика.
Используйте опции во вкладке View, чтобы измениться, как PID Tuner отображает несколько графиков.
Экспортируйте свое проектирование контроллера в рабочее пространство MATLAB.
Чтобы экспортировать ваше итоговое проектирование контроллера в рабочее пространство MATLAB, нажмите![]() Export. PID Tuner экспортирует контроллер как a
Export. PID Tuner экспортирует контроллер как a
В качестве альтернативы можно экспортировать модель с помощью контекстного меню в Data Browser. Для этого кликните по вкладке Data Browser.
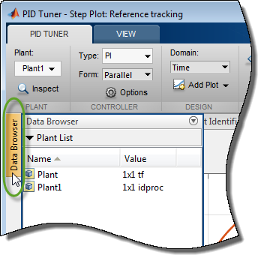
Затем щелкните правой кнопкой по модели и выберите Export.

