Control System Tuner параметрирует каждый блок, который вы определяете для настройки.
Когда вы настраиваете модель Simulink®, Control System Tuner автоматически присваивает параметризацию по умолчанию настраиваемым блокам в модели. Параметризация по умолчанию зависит от типа блока. Например, блок PID Controller, сконфигурированный для структуры PI, параметрируется пропорциональным усилением и интегральным усилением можно следующим образом:
Kp и Ki являются настраиваемыми параметрами, значения которых оптимизированы, чтобы удовлетворить вашим заданным настраивающим целям.
Когда вы настраиваете предопределенную архитектуру управления или MATLAB® (обобщенное пространство состояний) модель, вы задаете параметризацию каждого настраиваемого блока, когда вы создаете его в командной строке MATLAB. Например, можно использовать tunablePID создать настраиваемый блок PID.
Control System Tuner позволяет вам просмотреть и изменить параметризацию любого блока, который будет настроен. Изменение параметризации может включать изменение структуры или текущих значений параметров. Можно также назвать отдельные параметры блоков зафиксированными (ненастраиваемый) или ограничивать их диапазон настройки.
Чтобы получить доступ к параметризации блока, который вы определяли как настроенный блок, в Data Browser, в области Tuned Blocks, дважды кликают имя блока. Диалоговое окно Tuned Block Editor открывается, отображая текущую параметризацию блока.
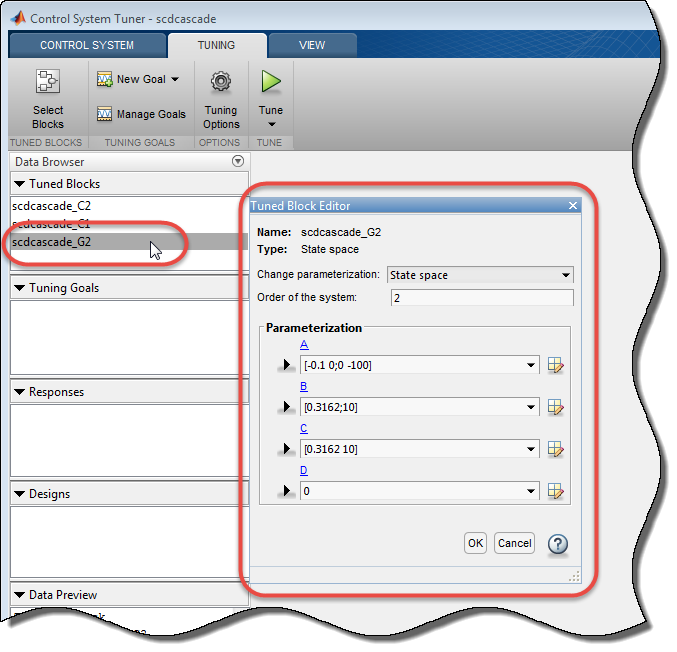
Поля Tuned Block Editor отображают тип параметризации, такой как PID, State-Space, или Gain. Для более определенной информации о полях щелкнуть![]() .
.
Чтобы найти настроенный блок в модели Simulink, щелкните правой кнопкой по имени блока по Data Browser и выберите Highlight.
Можно изменить текущее значение параметра, зафиксировать его текущее значение (сделайте параметр ненастраиваемым), или ограничьте диапазон настройки параметра.
Чтобы изменить текущее значение параметров, введите новое значение в его текстовом поле. В качестве альтернативы щелкните![]() , чтобы использовать редактора переменных, чтобы изменить текущее значение. При попытке ввести недопустимое значение, параметр возвращается к своему предыдущему значению.
, чтобы использовать редактора переменных, чтобы изменить текущее значение. При попытке ввести недопустимое значение, параметр возвращается к своему предыдущему значению.
Щелкните![]() , чтобы получить доступ и отредактировать дополнительные свойства каждого параметра.
, чтобы получить доступ и отредактировать дополнительные свойства каждого параметра.
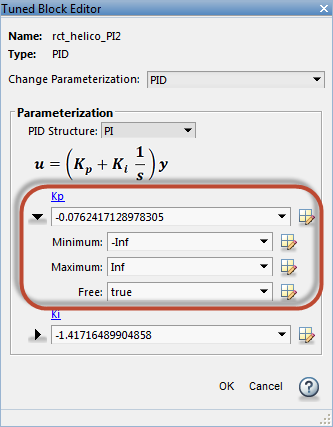
Minimum — Минимальное значение, которое может принять параметр, когда система управления настраивается.
Maximum — Максимальное значение, которое может принять параметр, когда система управления настраивается.
Free — Когда значением является true, Control System Toolbox настраивает параметр. Чтобы зафиксировать значение параметра, установите Free на false.
Для параметров со знаком массива можно установить эти свойства независимо для каждой записи в массиве. Например, для усиления с векторным знаком длины 3, введите [1 10 100] устанавливать текущее значение трех усилений к 1, 10, и 100 соответственно. В качестве альтернативы щелкните![]() , чтобы использовать редактора переменных, чтобы задать такие значения.
, чтобы использовать редактора переменных, чтобы задать такие значения.
Для векторных или параметров с матричным знаком можно использовать параметр Free, чтобы ограничить структуру параметра. Например, чтобы ограничить параметр с матричным знаком, чтобы быть диагональной матрицей, установите текущие значения недиагональных элементов к 0 и установите соответствующие записи в Free к false.
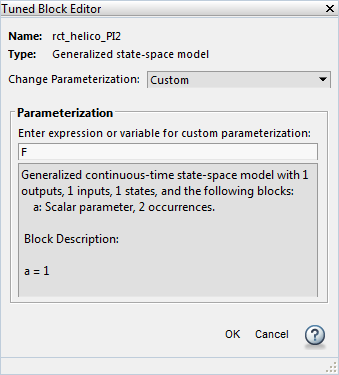
При настройке системы управления, представленной моделью Simulink или Предопределенной Архитектурой Обратной связи, можно задать пользовательскую параметризацию для любого настроенного блока с помощью обобщенного пространства состояний (genss) модель. Для этого создайте и сконфигурируйте genss модель в рабочем пространстве MATLAB, которое имеет желаемую параметризацию, начальные значения параметров и свойства параметра. В диалоговом окне Change parameterization выберите Custom. В области Parameterization, имени переменной genss модель.
Например, предположите, что вы хотите задать настраиваемый фильтр lowpass, F = a / (s +a), где настраиваемого параметра. Во-первых, в командной строке MATLAB, создайте настраиваемый genss модель, которая представляет структуру фильтра lowpass.
a = realp('a',1);
F = tf(a,[1 a]);
F =
Generalized continuous-time state-space model with 1 outputs, 1 inputs,
1 states, and the following blocks:
a: Scalar parameter, 2 occurrences.
Type "ss(F)" to see the current value, "get(F)" to see all properties, and
"F.Blocks" to interact with the blocks.
Затем в Настроенном Редакторе Блока введите F в области Parameterization.
Когда вы задаете пользовательскую параметризацию для блока Simulink, вы не можете смочь записать настроенное значение блока обратно к модели Simulink. При записи значений в блоки Simulink Control System Tuner пропускает блоки, которые не могут представлять настроенное значение прямым и способом без потерь. Например, если вы повторно параметрируете блок Simulink PID Controller как модель в пространстве состояний третьего порядка, Control System Tuner не запишет настроенное значение обратно с блоком.
Когда Control System Tuner записывает настроенные параметры обратно к модели Simulink, каждое настроенное значение блока автоматически преобразовано от шага расчета, используемого в настройке к шагу расчета блока Simulink. Когда эти два шага расчета отличаются, Настроенный Редактор Блока содержит дополнительные опции преобразования уровня, которые задают, как эта операция передискретизации выполняется для соответствующего блока.
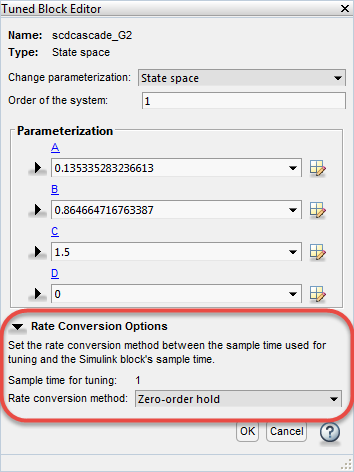
По умолчанию Control System Tuner выполняет линеаризацию и настраивающийся в непрерывное время (шаг расчета = 0). Можно задать линеаризацию дискретного времени и настройку и изменить шаг расчета. Для этого на вкладке Control System, нажмите Linearization Options. Шаг расчета для настройки отражает шаг расчета, заданный в диалоговом окне Linearization Options.
Остающиеся опции преобразования уровня зависят от параметрированного блока.
Для параметризации непрерывного времени PID Controller и блоки PID Controller (2-DOF), можно независимо задать методы преобразования уровня как формулы дискретизации для интегратора и производного фильтра. У каждого есть следующие опции:
Trapezoidal (значение по умолчанию) — Интегратор или производный фильтр, дискретизированный как (Ts/2)*(z+1)/(z-1), где Ts целевой шаг расчета.
Forward Euler — Ts/(z-1).
Backward Euler — Ts*z/(z-1).
Для получения дополнительной информации о формулах дискретизации ПИДа, смотрите Контроллеры Пропорциональной Интегральной Производной (PID) Дискретного времени.
В течение дискретного времени PID Controller и блоки PID Controller (2-DOF), вы устанавливаете интегратор и производные методы фильтра в диалоговом окне блока. Вы не можете изменить их в Настроенном Редакторе Блока.
Для блоков кроме блоков PID Controller следующие методы преобразования уровня доступны:
Zero-order hold — Нулевой порядок держится входные параметры. Для большинства динамических блоков это - метод преобразования уровня по умолчанию.
Tustin — Билинейный (Тастин) приближение.
Tustin with prewarping — Приближение Тастина с лучшим соответствием между исходной и преобразованной в уровень динамикой на частоте перед деформацией. Введите частоту в поле Prewarping frequency.
First-order hold — Линейная интерполяция входных параметров.
Matched (Только SISO) — Нулевые полюсные эквиваленты соответствия.
Для более подробной информации об этих методах преобразования уровня см. Непрерывно-дискретные Методы Преобразования.
Для следующих блоков вы не можете установить метод преобразования уровня в Настроенном Редакторе Блока.
Блок PID Controller и PID Controller (2-DOF) дискретного времени. Установите интегратор и производные методы фильтра в диалоговом окне блока.
Блок Gain, потому что это статически.
Блок Transfer Fcn Real Zero. Этот блок может только быть настроен в шаге расчета, заданном в блоке.
Блокируйтесь, который был дискретизирован с помощью Discretizer Модели. Шаг расчета для этого блока задан в самом Discretizer Модели.
