Ограничьте динамику заданного настраиваемого блока в настроенной системе управления, при использовании Control System Tuner.
Цель полюсов контроллера ограничивает динамику настраиваемого блока в вашей модели системы управления. Цель полюсов контроллера может наложить ограничение устойчивости на заданный блок. Можно также задать конечный минимальный уровень затухания, минимальный уровень затухания или максимальную собственную частоту для полюсов блока. Эти ограничения позволяют вам устранять быструю динамику и управление, звенящее в ответе настраиваемого блока.
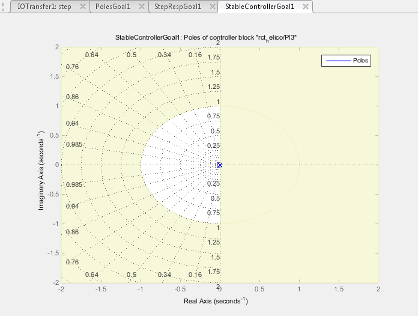
В Control System Tuner заштрихованная область на графике представляет область в частотном диапазоне, где ограничениям местоположения полюса не соответствуют. Ограничение применяется ко всем полюсам в блоке кроме фиксированных интеграторов, таких как я называют ПИД-регулятора.
Чтобы ограничить динамику или гарантировать устойчивость целой системы управления или обратной связи в системе управления, используйте Цель полюсов.
Во вкладке Tuning Control System Tuner выберите New Goal> Constraint on controller dynamics, чтобы создать Цель полюсов Контроллера.
При настройке систем управления в командной строке используйте TuningGoal.ControllerPoles задавать контроллер подпирает цель шестами.
В выпадающем меню выберите настроенный блок в своей системе управления, к которой можно применить Цель полюсов Контроллера.
Если блок, который вы хотите ограничить, не находится в списке, добавьте его в Настроенный список Блоков. В Control System Tuner, во вкладке Tuning, нажимают ![]() Select Blocks. Для получения дополнительной информации о добавлении настроенных блоков, смотрите, Задают Блоки, чтобы Настроить Control System Tuner.
Select Blocks. Для получения дополнительной информации о добавлении настроенных блоков, смотрите, Задают Блоки, чтобы Настроить Control System Tuner.
Используйте этот раздел диалогового окна, чтобы задать пределы на местоположениях полюса.
Minimum decay rate
Введите желаемый минимальный уровень затухания для полюсов настраиваемого блока. Полюса блока ограничиваются удовлетворить Re(s) < -MinDecay для блоков непрерывного времени или log(|z|) < -MinDecay*Ts поскольку дискретное время блокирует с шагом расчета Ts.
Задайте неотрицательное значение, чтобы гарантировать, что блок устойчив. Если вы задаете отрицательную величину, настроенный блок может включать нестабильные полюса.
Minimum damping
Введите желаемый минимальный коэффициент затухания полюсов настраиваемого блока как значение между 0 и 1. Полюса блока, которые зависят от настраиваемых параметров, ограничиваются удовлетворить Re(s) < -MinDamping*|s|. В дискретное время коэффициент затухания вычисляется с помощью s=log(z)/Ts.
Maximum natural frequency
Введите целевую максимальную собственную частоту полюсов настраиваемого блока в модулях модели системы управления, которую вы настраиваете. Полюса блока ограничиваются удовлетворить |s| < MaxFrequency для блоков непрерывного времени или |log(z)| < MaxFrequency*Ts поскольку дискретное время блокирует с шагом расчета Ts. Это ограничение предотвращает быструю динамику в настраиваемом блоке.
Когда вы настраиваете систему управления, программное обеспечение преобразует каждую настраивающую цель в нормированное скалярное значение f (x). Здесь, x является вектором свободных (настраиваемых) параметров в системе управления. Программное обеспечение затем настраивает значения параметров, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающейся целью является трудное ограничение.
Для Controller Poles Goal f (x) отражает относительную удовлетворенность или нарушение цели. Например, если ваша Цель полюсов Контроллера ограничивает полюс настроенного блока к минимальному затуханию ζ = 0.5, то:
f (x) = 1 среднее значение затухание полюса является ζ = 0.5 точно.
f (x) = 1,1 средних значения затухание является ζ = 0.5/1.1 = 0.45, примерно на 10% меньше, чем цель.
f (x) = 0,9 средних значения затухание является ζ = 0.5/0.9 = 0.55, примерно на 10% лучше, чем цель.
