Установите минимальную норму для отклонения воздействий шага, при использовании Control System Tuner.
Используйте Step Rejection Goal, чтобы задать, как воздействие шага, введенное в заданном местоположении в вашей системе управления, влияет на сигнал в заданном выходном местоположении.
Можно задать желаемый ответ в терминах временного интервала пикового значения, времени урегулирования и коэффициента затухания. Control System Tuner пытается сделать фактическое отклонение, по крайней мере, столь же хорошим как желаемый ответ. В качестве альтернативы можно задать ответ как устойчивый образец модели, имеющий усиление DC. В этом случае настраивающаяся цель состоит в том, чтобы отклонить воздействие, а также или лучше, чем образец модели.
Чтобы задать подавление помех в терминах профиля затухания частотного диапазона, используйте Disturbance Rejection Goal.
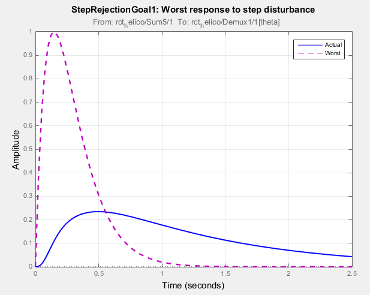
Когда вы создаете настраивающуюся цель в Control System Tuner, целевой настройкой график сгенерирован. Пунктирная линия показывает целевой переходной процесс, который вы задаете. Сплошная линия является текущим соответствующим ответом вашей системы.
Во вкладке Tuning Control System Tuner выберите New Goal> Rejection of step disturbance, чтобы создать Цель Отклонения Шага.
При настройке систем управления в командной строке используйте TuningGoal.StepRejection задавать цель переходного процесса.
Используйте этот раздел диалогового окна, чтобы задать вход, выведите, и открывающие цикл местоположения для оценки настраивающейся цели.
Specify step disturbance inputs
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно применить вход. Чтобы ограничить ответ SISO, выберите однозначный входной сигнал. Например, чтобы ограничить ответ неродного воздействия от местоположения под названием 'u' к местоположению под названием 'y', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'u'. Чтобы ограничить ответ MIMO, выберите несколько сигналов или сигнал с векторным знаком.
Specify step response outputs
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно измерить ответ на воздействие шага. Чтобы ограничить ответ SISO, выберите однозначный выходной сигнал. Например, чтобы ограничить переходный процесс от местоположения под названием 'u' к местоположению под названием 'y', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'y'. Чтобы ограничить ответ MIMO, выберите несколько сигналов или сигнал с векторным знаком. Для систем MIMO количество выходных параметров должно равняться количеству выходных параметров.
Compute the response with the following loops open
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно открыть обратную связь в целях оценки этой настраивающей цели. Настраивающаяся цель оценена против настройки разомкнутого цикла, созданной вводной обратной связью в местоположениях, которые вы идентифицируете. Например, чтобы оценить настраивающуюся цель с открытием в местоположении под названием 'x', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'x'.
Чтобы подсветить любой выбранный сигнал в модели Simulink®, щелкнуть![]() . Чтобы удалить сигнал из списка вводов или выводов, щелкнуть
. Чтобы удалить сигнал из списка вводов или выводов, щелкнуть![]() . Когда вы выбрали несколько сигналов, можно переупорядочить их использование
. Когда вы выбрали несколько сигналов, можно переупорядочить их использование![]() и
и![]() . Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
. Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
Используйте этот раздел диалогового окна, чтобы задать форму желаемого ответа на воздействие шага. Control System Tuner пытается сделать фактический ответ, по крайней мере, столь же хорошим как желаемый ответ.
Response Characteristics
Задайте желаемый ответ в терминах характеристик временного интервала. Введите максимальную амплитуду, максимальное время урегулирования и минимальное затухание, постоянное в текстовых полях.
Reference Model
Задайте желаемый ответ в терминах образца модели.
Введите имя образца модели в рабочей области MATLAB® в текстовом поле Reference Model. В качестве альтернативы введите команду, чтобы создать подходящий образец модели, такой как tf([1 0],[1 1.414 1]).
Образец модели должен быть устойчивым и должен иметь нулевое усиление DC. Модель может быть непрерывной или дискретной. Если модель дискретна, она может включать задержки, которые обработаны как полюса в z = 0.
Для лучших результатов образец модели и ответ разомкнутого цикла от воздействия до выхода должны иметь подобные усиления на частоте, где усиление образца модели достигает максимума.
Используйте этот раздел диалогового окна, чтобы задать дополнительные характеристики цели отклонения шага.
Adjust for amplitude of input signals и Adjust for amplitude of output signals
Для настраивающей цели MIMO, когда выбор модульных результатов в соединении маленьких и больших сигналов в различных каналах ответа, эта опция позволяет вам задавать относительную амплитуду каждой записи в сигналах с векторным знаком. Эта информация используется, чтобы масштабировать недиагональные условия в передаточной функции от настраивающихся целевых входных параметров до выходных параметров. Это масштабирование гарантирует, что перекрестные связи измеряются относительно амплитуды каждого ссылочного сигнала.
Когда эти опции установлены в No, ограничиваемая передаточная функция с обратной связью не масштабируется для относительных амплитуд сигнала. Когда выбор модульных результатов в соединении маленьких и больших сигналов, с помощью немасштабированной передаточной функции может привести к плохим настраивающим результатам. Установите опцию на Yes обеспечить относительные амплитуды входных сигналов и выходные сигналы вашей передаточной функции.
Например, предположите, что настраивающаяся цель ограничивает передаточную функцию с 2 выходами, с 2 входами. Предположим далее, что второй входной сигнал к передаточной функции имеет тенденцию быть приблизительно в 100 раз больше, чем первый сигнал. В этом случае выберите Yes и введите [1,100] в текстовом поле Amplitudes of input signals.
Корректировка амплитуды сигнала заставляет настраивающуюся цель быть оцененной на масштабированной передаточной функции Do –1T (s) Di, где T (s) является немасштабированной передаточной функцией. Do и Di являются диагональными матрицами с Amplitudes of output signals и значениями Amplitudes of input signals на диагонали, соответственно.
Значение по умолчанию, No, средние значения никакое масштабирование применяются.
Apply goal to
Используйте эту опцию при настройке многоуровневых моделей целиком, таких как массив моделей, полученных путем линеаризации модели Simulink в различных рабочих точках или значениях параметров блоков. По умолчанию активные настраивающие цели осуществляются для всех моделей. Чтобы осуществить настраивающееся требование для подмножества моделей в массиве, выберите Only Models. Затем введите индексы массива моделей, для которых осуществляется цель. Например, предположите, что вы хотите применить настраивающуюся цель к вторым, третьим, и четвертым моделям в массиве моделей. Чтобы ограничить осуществление требования, введите 2:4 в текстовом поле Only Models.
Для получения дополнительной информации о настройке для многоуровневых моделей, смотрите Устойчивые Настраивающие Подходы (Robust Control Toolbox).
Когда вы настраиваете систему управления, программное обеспечение преобразует каждую настраивающую цель в нормированное скалярное значение f (x). Здесь, x является вектором свободных (настраиваемых) параметров в системе управления. Программное обеспечение затем настраивает значения параметров, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающееся требование является трудным ограничением.
Step Rejection Goal стремится сохранять усиление от воздействия, чтобы вывести ниже усиления образца модели. Скалярным значением требования f (x) дают:
или его эквивалентное дискретное время. Здесь, Tdy (s, x) является передаточной функцией с обратной связью ограниченного ответа, и обозначает H ∞ норма (см. norm). WF является функцией взвешивания частоты, выведенной из профиля неродного отклонения, который вы задаете в настраивающейся цели. Усиление WF примерно совпадает с инверсией образца модели для значений усиления в 60 дБ пикового усиления. По числовым причинам функция взвешивания выравнивается вне этой области значений, если вы не задаете образец модели, который изменяет наклон вне этой области значений. Эта корректировка называется regularization. Поскольку полюса WF близко к s = 0 или s = Inf может привести к плохому числовому созданию условий для настройки, не рекомендуется задать образцы модели с очень низкочастотной или очень высокочастотной динамикой. Для получения дополнительной информации о регуляризации и ее эффектах, смотрите, Визуализируют Настраивающиеся Цели.
Эта настраивающая цель также налагает неявное ограничение устойчивости на передаточную функцию с обратной связью между заданными входными параметрами к выходным параметрам, оцененным с циклами, открытыми в заданных открывающих цикл местоположениях. Движущими силами, затронутыми этим неявным ограничением, является stabilized dynamics для этой настраивающей цели. Minimum decay rate и Maximum natural frequency, настраивающий опции, управляют нижними и верхними границами на этих неявно ограниченных движущих силах. Если оптимизации не удается соответствовать границам по умолчанию, или если конфликт границ по умолчанию с другими требованиями, на вкладке Tuning, использует Tuning Options, чтобы изменить значения по умолчанию.
