Обобщенные crosscorrelator с фазой преобразовывают
Направление прибытия
phaseddoalib
Блок GCC DOA and TOA оценивает направление прибытия и время прибытия сигнала в массиве. Блок использует обобщенную взаимную корреляцию с поэтапным преобразованием (GCC-PHAT) алгоритм.
Задайте скорость распространения сигнала, в метрах в секунду, как положительная скалярная величина. Можно использовать функциональный physconst задавать скорость света.
Установите этот флажок, чтобы наследовать частоту дискретизации от восходящих блоков. В противном случае задайте частоту дискретизации с помощью параметра Sample rate (Hz).
Задайте уровень выборки сигнала (в герц) как положительная скалярная величина. Этот параметр появляется только, когда параметр Inherit sample rate не выбран.
Источник
Property | Когда вы устанавливаете этот параметр на |
Auto | Когда вы устанавливаете этот параметр на |
Пары датчика в виде 2 M матрицей строго положительных целых чисел. Этот параметр появляется только, когда вы устанавливаете параметр Source of sensor pairs на Property.
Установите этот флажок, чтобы вывести вычисленное использование корреляций алгоритма GCC-PHAT, а также соответствующих задержек между парами датчика. Значения корреляции выводятся через Rxy порт. Отстаньте значения выводятся через Lags порт. Эти порты появляются только, когда вы устанавливаете флажок Enable correlation output. Снимите этот флажок, чтобы отключить выход корреляций.
Установите этот флажок, чтобы вывести задержку, соответствующую углу падения сигнала между каждой парой датчика. Задержка выводится в Tau порт. Этот порт появляется только, когда вы устанавливаете флажок Enable delay output. Снимите этот флажок, чтобы отключить выход задержек.
Блокируйте метод симуляции в виде Interpreted Execution или Code Generation. Если вы хотите, чтобы ваш блок использовал интерпретатор MATLAB®, выбрал Interpreted Execution. Если вы хотите, чтобы ваш блок запустился как скомпилированный код, выбрал Code Generation. Скомпилированный код требует, чтобы время скомпилировало, но обычно запускается быстрее.
Интерпретированное выполнение полезно, когда вы разрабатываете и настраиваете модель. Блок запускает базовую Систему object™ в MATLAB. Можно изменить и выполнить модель быстро. Когда вы удовлетворены своими результатами, можно затем запустить блок с помощью Code Generation. Долгие симуляции запускаются быстрее, чем они были бы в интерпретированном выполнении. Можно запустить повторенное выполнение без перекомпиляции. Однако, если вы изменяете какие-либо параметры блоков, затем блок автоматически перекомпилировал перед выполнением.
При установке этого параметра необходимо учесть полный режим симуляции модели. Таблица показывает, как параметр Simulate using взаимодействует с полным режимом симуляции.
Когда модель Simulink® находится в Accelerator режим, блочный режим, заданный с помощью Simulate using, заменяет режим симуляции.
Ускоряющие режимы
| Блокируйте симуляцию | Поведение симуляции | ||
Normal | Accelerator | Rapid Accelerator | |
Interpreted Execution | Блок выполняет использование интерпретатора MATLAB. | Блок выполняет использование интерпретатора MATLAB. | Создает независимый исполняемый файл из модели. |
Code Generation | Блок скомпилирован. | Все блоки в модели скомпилированы. | |
Для получения дополнительной информации смотрите Выбор Simulation Mode (Simulink).
Элемент датчика или сенсорная матрица заданы. Сенсорная матрица может также содержать подмассивы или как разделенный массив. Этот параметр может также быть выражен как выражение MATLAB.
Типы
Array (no subarrays) |
Partitioned array |
Replicated subarray |
MATLAB expression |
Задайте геометрию массивов как одно из следующего:
ULA — Универсальная линейная матрица
URA — Универсальный прямоугольный массив
UCA — Универсальный круговой массив
Conformal Array — произвольные положения элемента
Количество элементов массива.
Количество элементов массива в виде положительного целого числа. Этот параметр появляется, когда Geometry установлен в ULA или UCA. Если Sensor Array имеет Replicated subarray опция, этот параметр применяется к подмассиву.
Этот параметр появляется, когда Geometry установлен в URA. Когда Sensor Array установлен в Replicated subarray, этот параметр применяется к подмассивам.
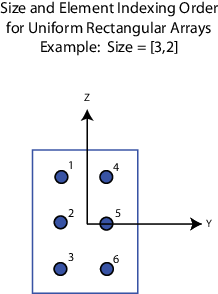
Задайте размер массива как положительное целое число или вектор 1 на 2 положительных целых чисел.
Если Array size является вектором 1 на 2, вектор имеет форму [NumberOfArrayRows,NumberOfArrayColumns].
Если Array size является целым числом, массив имеет одинаковое число строк и столбцы.
Для URA элементы индексируются сверху донизу вдоль столбца и продолжающийся к следующим столбцам слева направо. В этом рисунке, Array size [3,2] производит массив трех строк и двух столбцов.
Этот параметр появляется, когда Geometry установлен в ULA или URA. Когда Sensor Array имеет Replicated subarray опция, этот параметр применяется к подмассивам.
Для ULA, задайте интервал, в метрах, между двумя смежными элементами в массиве как скаляр.
Для URA, задайте интервал элемента массива, в метрах, как вектор 1 на 2 или скаляр. Если Element spacing является вектором 1 на 2, вектор имеет форму [SpacingBetweenRows,SpacingBetweenColumns]. Для обсуждения этих количеств смотрите phased.URA. Если Element spacing является скаляром, интервалы между строками и столбцами равны.
Этот параметр появляется, когда параметр Geometry устанавливается на ULA или когда блок только поддерживает геометрию массивов ULA. Задайте ось массивов как xY, или z. Все элементы массива ULA расположены равными интервалами вдоль этой оси в системе координат локального массива.
Этот параметр появляется, когда вы устанавливаете Geometry на URA или UCA. Задайте Array normal как xY, или z. Весь URA и элементы массива UCA помещаются в yz, zx или xy - плоскости, соответственно, системы координат массивов.
Радиус универсального кругового массива, заданного как положительная скалярная величина. Модули являются метрами.
Этот параметр появляется, когда Geometry установлен в UCA.
Заострения, также известные как element weights, применяются к элементам датчика в массиве. Заострения используются, чтобы изменить и амплитуду и фазу переданных или полученных данных.
Этот параметр применяется ко всем типам массива, но когда вы устанавливаете Sensor Array на Replicated subarray, этот параметр применяется к подмассивам.
Для ULA или UCA, укажите элемент, заостряющийся как скаляр с комплексным знаком или 1 с комплексным знаком N вектором-строкой. В этом векторе N представляет число элементов в массиве. Если Taper является скаляром, тот же вес применяется к каждому элементу. Если Taper является вектором, вес от вектора применяется к соответствующему элементу датчика. Вес должен быть применен к каждому элементу в сенсорной матрице.
Для URA, укажите элемент, заостряющийся как скалярный или M с комплексным знаком с комплексным знаком-by-N матрица. В этой матрице M является числом элементов вдоль z - ось, и N является числом элементов вдоль y - ось. M и N соответствуют значениям [NumberofArrayRows,NumberOfArrayColumns] в матрице Array size. Если Taper скаляр, тот же вес применяется к каждому элементу. Если Taper является матрицей, вес из матрицы применяется к соответствующему элементу датчика. Вес должен быть применен к каждому элементу в сенсорной матрице.
Для Conformal Array, укажите элемент, заостряющийся как скаляр с комплексным знаком или 1 с комплексным знаком N вектором. В этом векторе N является числом элементов в массиве, как определено размером вектора Element positions. Если Taper является скаляром, тот же вес применяется к каждому элементу. Если значение Taper является вектором, вес от вектора применяется к соответствующему элементу датчика. Вес должен быть применен к каждому элементу в сенсорной матрице.
Этот параметр появляется, когда Geometry установлен в URA. Когда Sensor Array установлен в Replicated subarray, этот параметр применяется к подмассиву.
Задайте решетку элемента как Rectangular или Triangular
Rectangular — Выравнивает все элементы последовательно и направления столбца.
Triangular— Переключает элементы ровной строки прямоугольной решетки к направлению оси положительной строки. Смещение является половиной интервала элемента по измерению строки.
Этот параметр появляется, когда Geometry установлен в Conformal Array. Когда Sensor Array установлен в Replicated subarray, этот параметр применяется к подмассивам.
Задайте положения конформных элементов массива как 3 N матрицей, где N является числом элементов в конформном массиве. Каждый столбец Element positions (m) представляет положение одного элемента в форме [x;y;z], в системе локальной координаты массива. Система локальной координаты возникает в произвольной точке. Модули исчисляются в метрах.
Этот параметр появляется, когда Geometry установлен в Conformal Array. Когда Sensor Array установлен в Replicated subarray, этот параметр применяется к подмассивам.
Задайте нормальные направления элементов в конформном массиве как 2 N матрицей или 2 1 вектор-столбец в градусах. Переменная N указывает на число элементов в массиве. Если Element normals (deg) является матрицей, каждый столбец задает нормальное направление соответствующего элемента в форме [azimuth;elevation], относительно системы локальной координаты. Система локальной координаты выравнивает положительный x - ось с направлением, нормальным к конформному массиву. Если Element normals (deg) 2 1 вектор-столбец, вектор задает то же направление обращения для всех элементов в массиве.
Можно использовать Element positions (m) и параметры Element normals (deg), чтобы представлять любое расположение, по которому пары элементов отличаются определенными преобразованиями. Можно объединить перевод, вращение азимута и преобразования вращения вертикального изменения. Однако вы не можете использовать преобразования, которые требуют вращения вокруг нормального.
Этот параметр появляется, когда Specify sensor array as установлен в Partitioned array.
Задайте выбор подмассива как M-by-N матрица. M является количеством подмассивов, и N является общим количеством элементов в массиве. Каждая строка матрицы соответствует подмассиву, и каждая запись в строке указывает, принадлежит ли элемент подмассиву. Когда запись является нулем, элемент не принадлежит подмассив. Ненулевая запись представляет вес с комплексным знаком, применился к соответствующему элементу. Каждая строка должна содержать по крайней мере одну ненулевую запись.
Центр фазы каждого подмассива является своим геометрическим центром. Subarray definition matrix и Geometry определяют геометрический центр.
Этот параметр появляется, когда параметр Specify sensor array as устанавливается на Partitioned array или Replicated subarray.
Задайте руководящий метод подмассива как также
None
Phase
Time
Custom
Выбор Phase или Time открывает Steer входной порт на Narrowband Receive Array, Narrowband Transmit Array, Wideband Receive Array, блоках Wideband Transmit Array, Constant Gamma Clutter и блоках GPU Constant Gamma Clutter.
Выбор Custom открывает WS входной порт на Narrowband Receive Array, Narrowband Transmit Array, Wideband Receive Array, блоках Wideband Transmit Array, Constant Gamma Clutter и блоках GPU Constant Gamma Clutter.
Этот параметр появляется, когда вы устанавливаете Sensor array на Partitioned array или Replicated subarray и вы устанавливаете Subarray steering method на Phase.
Задайте рабочую частоту, в герц, фазовращателей, чтобы выполнить подмассив, держащийся как положительная скалярная величина.
Этот параметр появляется, когда вы устанавливаете Sensor array на Partitioned array или Replicated subarray и вы устанавливаете Subarray steering method на Phase.
Количество битов раньше квантовало компонент сдвига фазы формирователя луча или регулирующий векторные веса. Задайте количество битов как неотрицательное целое число. Значение нуля указывает, что никакое квантование не выполняется.
Этот параметр появляется, когда вы устанавливаете Sensor array на Replicated subarray.
Задайте размещение реплицированных подмассивов как Rectangular или Custom.
Этот параметр появляется, когда вы устанавливаете Sensor array на Replicated subarray и Subarrays layout к Rectangular.
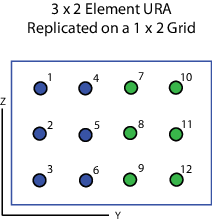
Прямоугольный размер сетки подмассива в виде одного положительного целого числа или положительного с целочисленным знаком 1 2 вектор-строка.
Если Grid size является целочисленным скаляром, массив имеет равное количество подмассивов в каждой строке и столбце. Если Grid size является вектором 1 на 2 формы [NumberOfRows, NumberOfColumns], первая запись является количеством подмассивов вдоль каждого столбца. Вторая запись является количеством подмассивов в каждой строке. Строка приезжает локальный y - ось, и столбец приезжает локальный z - ось. Рисунок здесь показывает, как можно реплицировать 3 2 подмассив URA с помощью Grid size [1,2].
Этот параметр появляется, когда вы устанавливаете Sensor array на Replicated subarray и Subarrays layout к Rectangular.
Задайте прямоугольный интервал сетки подмассивов как положительная скалярная величина с действительным знаком, 1 2 вектор-строка или Auto. Модули разрядки сетки выражаются в метрах.
Если Grid spacing является скаляром, интервал вдоль строки и интервал вдоль столбца являются тем же самым.
Если Grid spacing является 1 2 вектором-строкой, вектор имеет форму [SpacingBetweenRows,SpacingBetweenColumn]. Первая запись задает интервал между строками вдоль столбца. Вторая запись задает интервал между столбцами вдоль строки.
Если Grid spacing установлен в Auto, репликация сохраняет интервал элемента подмассива для обеих строк и столбцов при создании полного массива. Эта опция доступна только, когда вы задаете Geometry как ULA или URA.
Этот параметр появляется, когда вы устанавливаете Sensor array на Replicated subarray и Subarrays layout к Custom.
Задайте положения подмассивов в пользовательской сетке как 3 N матрицей, где N является количеством подмассивов в массиве. Каждый столбец матрицы представляет положение одного подмассива, в метрах, в системе локальной координаты массива. Координаты выражаются в форме [x; y; z].
Этот параметр появляется, когда вы устанавливаете параметр Sensor array на Replicated subarray и Subarrays layout к Custom.
Задайте нормальные направления подмассивов в массиве. Это значение параметров является 2 N матрицей, где N является количеством подмассивов в массиве. Каждый столбец матрицы задает нормальное направление соответствующего подмассива в форме [azimuth; elevation]. Каждый угол в градусах и задан в системе локальной координаты.
Можно использовать Subarray positions и параметры Subarray normals, чтобы представлять любое расположение, по которому пары подмассивов отличаются определенными преобразованиями. Преобразования могут объединить перевод, вращение азимута и вращение вертикального изменения. Однако вы не можете использовать преобразования, которые требуют вращения вокруг нормального.
Допустимое выражение MATLAB, содержащее конструктора Array, например, phased.URA.
Задайте антенну или тип микрофона как
Isotropic Antenna
Cosine Antenna
Custom Antenna
Omni Microphone
Custom Microphone
Этот параметр появляется, когда вы устанавливаете Element type на Cosine Antenna.
Задайте экспоненту шаблона косинуса как скаляр или вектор 1 на 2. Необходимо задать все значения как неотрицательные вещественные числа. Когда вы устанавливаете Exponent of cosine pattern на скаляр, и шаблон направляющего косинуса азимута и шаблон направляющего косинуса вертикального изменения повышены до заданного значения. Когда вы устанавливаете Exponent of cosine pattern на вектор 1 на 2, первым элементом является экспонента для шаблона направляющего косинуса азимута, и вторым элементом является экспонента для шаблона направляющего косинуса вертикального изменения.
Этот параметр появляется, когда Element type установлен в Isotropic Antenna, Cosine Antenna, или Omni Microphone.
Задайте операционный частотный диапазон, в герц, элемента антенны как 1 2 вектор-строка в форме [LowerBound,UpperBound]. Элемент антенны не имеет никакого ответа вне заданного частотного диапазона.
Этот параметр появляется, когда Element type установлен в Custom Antenna или Custom Microphone.
Задайте частоты в Гц, на уровне которого можно установить антенну и частотные характеристики микрофона как 1 L вектором-строкой из увеличения значений. Используйте Frequency responses, чтобы установить частотные характеристики. Элемент антенны или микрофона не имеет никакого ответа вне частотного диапазона, заданного минимальными и максимальными элементами Operating frequency vector (Hz).
Этот параметр появляется, когда Element type установлен в Custom Antenna или Custom Microphone.
Задайте этот параметр как частотную характеристику антенны или микрофона, в децибелах, для частот, заданных Operating frequency vector (Hz). Задайте Frequency responses (dB) как 1 L вектором, совпадающим с размерностями вектора, заданного в Operating frequency vector (Hz).
Система координат пользовательского шаблона антенны, заданного az-el или phi-theta. Когда вы задаете az-el, используйте Azimuth angles (deg) и параметры Elevations angles (deg), чтобы задать координаты точек шаблона. Когда вы задаете phi-theta, используйте Phi angles (deg) и параметры Theta angles (deg), чтобы задать координаты точек шаблона.
Этот параметр появляется, когда Element type установлен в Custom Antenna и параметр Input Pattern Coordinate System устанавливается на az-el.
Задайте углы азимута, под которыми можно вычислить диаграмму направленности антенн как 1 P вектором-строкой. P должен быть больше 2. Угловые модули в градусах. Углы азимута должны находиться между-180 ° и 180 ° и быть в строго увеличивающемся порядке.
Этот параметр появляется, когда Element type установлен в Custom Antenna и параметр Input Pattern Coordinate System устанавливается на az-el.
Задайте углы вертикального изменения, под которыми можно вычислить диаграмму направленности как 1 Q вектором. Q должен быть больше 2. Угловые модули в градусах. Углы вертикального изменения должны находиться между-90 ° и 90 ° и быть в строго увеличивающемся порядке.
Этот параметр появляется, когда Element type установлен в Custom Antenna и параметр Input Pattern Coordinate System устанавливается на phi-theta.
Углы Phi точек, в которых можно задать диаграмму направленности антенн, задайте как 1 P вектором-строкой. P должен быть больше 2. Угловые модули в градусах. Углы Phi должны находиться между 0 ° и 360 ° и быть в строго увеличивающемся порядке.
Этот параметр появляется, когда Element type установлен в Custom Antenna и параметр Input Pattern Coordinate System устанавливается на phi-theta.
Углы теты точек, в которых можно задать диаграмму направленности антенн, задайте как 1 Q вектором-строкой. Q должен быть больше 2. Угловые модули в градусах. Углы теты должны находиться между 0 ° и 180 ° и быть в строго увеличивающемся порядке.
Этот параметр появляется, когда Element type установлен в Custom Antenna.
Величина объединенной диаграммы направленности антенн в виде Q-by-P матрица или Q-by-P-by-L массив.
Когда параметр Input Pattern Coordinate System устанавливается на az-el, Q равняется длине вектора, заданного параметром Elevation angles (deg), и P равняется длине вектора, заданного параметром Azimuth angles (deg).
Когда параметр Input Pattern Coordinate System устанавливается на phi-theta, Q равняется длине вектора, заданного параметром Theta Angles (deg), и P равняется длине вектора, заданного параметром Phi Angles (deg).
Количество L равняется длине Operating frequency vector (Hz).
Если этим параметром является Q-by-P матрица, тот же шаблон применяется ко всем частотам, заданным в параметре Operating frequency vector (Hz).
Если значением является Q-by-P-by-L массив, каждый Q-by-P страница массива задает шаблон для соответствующей частоты, заданной в параметре Operating frequency vector (Hz).
Этот параметр появляется, когда Element type установлен в Custom Antenna.
Фаза объединенной диаграммы направленности антенн в виде Q-by-P матрица или Q-by-P-by-L массив.
Когда параметр Input Pattern Coordinate System устанавливается на az-el, Q равняется длине вектора, заданного параметром Elevation angles (deg), и P равняется длине вектора, заданного параметром Azimuth angles (deg).
Когда параметр Input Pattern Coordinate System устанавливается на phi-theta, Q равняется длине вектора, заданного параметром Theta Angles (deg), и P равняется длине вектора, заданного параметром Phi Angles (deg).
Количество L равняется длине Operating frequency vector (Hz).
Если этим параметром является Q-by-P матрица, тот же шаблон применяется ко всем частотам, заданным в параметре Operating frequency vector (Hz).
Если значением является Q-by-P-by-L массив, каждый Q-by-P страница массива задает шаблон для соответствующей частоты, заданной в параметре Operating frequency vector (Hz).
Если этим параметром является Q-by-P матрица, тот же шаблон применяется ко всем частотам, заданным в параметре Operating frequency vector (Hz).
Если значением является Q-by-P-by-L массив, каждый Q-by-P страница массива задает шаблон для соответствующей частоты, заданной в параметре Operating frequency vector (Hz).
Этот параметр появляется, когда Element type установлен в Custom Antenna.
Установите этот флажок, чтобы вращать шаблон элемента антенны, чтобы выровняться с нормальным массивом. Если не выбранный, шаблон элемента не вращается.
Когда антенна используется в антенной решетке, и параметром Input Pattern Coordinate System является az-el, установка этого флажка вращает шаблон так, чтобы x - ось системы координат элемента указала вдоль нормального массива. Выбор использует шаблон элемента без вращения.
Когда антенна используется в антенной решетке, и Input Pattern Coordinate System установлен в phi-theta, установка этого флажка вращает шаблон так, чтобы z - ось системы координат элемента указала вдоль нормального массива.
Используйте параметр в сочетании с параметром Array normal URA и UCA массивы.
Этот параметр появляется, когда Element type установлен в Custom Microphone.
Задайте измеряющиеся частоты полярных шаблонов как 1 M вектором. Измеряющиеся частоты лежат в частотном диапазоне, заданном параметром Operating frequency vector (Hz). Единицы частоты находятся в Гц.
Этот параметр появляется, когда Element type установлен в Custom Microphone.
Задайте измеряющиеся углы полярных шаблонов как 1 N вектором. Углы измеряются от центральной оси погрузки микрофона и должны быть между-180 ° и 180 °, включительно.
Этот параметр появляется, когда Element type установлен в Custom Microphone.
Задайте величину элемента микрофона полярный шаблон как M-by-N матрица. M является количеством измеряющихся частот, заданных в Polar pattern frequencies (Hz). N является количеством измеряющихся углов, заданных в Polar pattern angles (deg). Каждая строка матрицы представляет величину полярного шаблона, измеренного на соответствующей частоте, заданной в Polar pattern frequencies (Hz) и всех углах, заданных в Polar pattern angles (deg). Примите, что шаблон измеряется в плоскости азимута. В плоскости азимута угол вертикального изменения составляет 0 °, и центральная ось погрузки является азимутом степеней на 0 ° и вертикальным изменением степеней на 0 °. Примите, что полярный шаблон симметричен вокруг центральной оси. Можно создать шаблон ответа микрофона в трехмерном пространстве от полярного шаблона.
Этот флажок появляется только, когда параметр Element type устанавливается на Isotropic Antenna или Omni Microphone.
Установите этот флажок, чтобы экранировать задней части элемента антенны. В этом случае ответы антенны на все углы азимута вне ±90 ° от broadside обнуляются. Задайте поперечное направление как угол азимута на 0 ° и угол вертикального изменения на 0 °.
Порты ввода и вывода блока соответствуют параметрам ввода и вывода, описанным в step метод базового Системного объекта. Смотрите ссылку в нижней части этой страницы.
| Порт | Описание | Поддерживаемые типы данных |
|---|---|---|
In | Входной сигнал. Размер первой размерности входной матрицы может варьироваться, чтобы симулировать изменяющуюся длину сигнала. Изменение размера может произойти, например, в случае импульсного сигнала с переменной импульсной частотой повторения. | Плавающая точка двойной точности |
Ang | Предполагаемые углы DOA. | Плавающая точка двойной точности |
Rxy | Предполагаемая взаимная корреляция. | Плавающая точка двойной точности |
Lag | Задержки. | Плавающая точка двойной точности |
Tau | Задержки прибытия. | Плавающая точка двойной точности |
