Постоянная гамма симуляция помехи с помощью gpu
Phased Array System Toolbox / Среда и Цель
Блок GPU Constant Gamma Clutter генерирует, с помощью графического блока обработки (GPU), постоянная гамма помеха, отраженная от гомогенного ландшафта для моностатического радара, передающего узкополосный сигнал в свободное пространство. Радар принят, чтобы быть на постоянной высоте, перемещающейся в постоянную скорость.
Terrain gamma value (dB) — Создайте помехи параметру моделиСоздайте помехи параметру модели в виде скаляра. Этот параметр содержит значение используется в константе модель помехи. значение зависит и от типа ландшафта и от рабочей частоты. Модули находятся в дБ.
Пример: -5.0
Типы данных: double
Earth model — Заземлите формуFlat (значение по умолчанию) | CurvedЗадайте наземную модель, используемую в симуляции помехи в качестве Flat или Curved. Когда вы устанавливаете этот параметр на Flat, земля принята, чтобы быть плоскостью. Когда вы устанавливаете этот параметр на Curved, земля принята, чтобы быть сферической.
Maximum range (m) — Максимальная область значений переданной помехиУкажите максимальный диапазон для симуляции помехи как положительная скалярная величина. Максимальная область значений должна быть больше значения, заданного в параметре Radar height (m) в панели Radar. Модули исчисляются в метрах.
Пример: 1000.0
Типы данных: double
Azimuth coverage (deg) — Угловое покрытие помехиПокрытие азимута в виде положительной скалярной величины. Симуляция помехи покрывает область, имеющую заданный промежуток азимута, сосредоточенный на азимуте нулевых степеней. Как правило, все закрашенные фигуры помехи имеют свои центры азимута в области, но путем устанавливания значения Clutter patch azimuth span (deg), можно заставить некоторые закрашенные фигуры расширять вне области. Модули в градусах.
Пример: 40
Типы данных: double
Clutter patch azimuth span (deg) — Промежуток азимута закрашенных фигур помехиПромежуток азимута каждой помехи исправляет в виде положительной скалярной величины. Модули в градусах.
Пример: 10
Типы данных: double
Clutter coherence time (s) — Время когерентности симуляции помехиInf (значение по умолчанию) | положительная скалярная величинаВремя когерентности для симуляции помехи в виде положительной скалярной величины. После того, как время когерентности протекает, блок обновляет случайные числа, которые это использует в симуляции помехи в следующем импульсе. Когда вы используете значение по умолчанию Inf, случайные числа никогда не обновляются. Модули находятся в секундах.
Пример 4
Типы данных: double
Sample rate (Hz) — Создайте помехи частоте дискретизации1e6 (значение по умолчанию) | положительная скалярная величинаСоздайте помехи частоте дискретизации в виде положительной скалярной величины. Модули находятся в Герц.
Пример: 10e6
Типы данных: double
Pulse repetition frequency (Hz) — Импульсная частота повторения1e4 (значение по умолчанию) | положительная скалярная величина | вектор-строка из положительных значенийИмпульсная частота повторения, PRF в виде положительной скалярной величины или вектора-строки из положительных значений. Модули находятся в Герц.
Пример: [1e4,2e4]
Типы данных: double
Enable PRF selection input — Выберите предопределил PRFВыберите этот параметр, чтобы включить PRFIdx порт.
Когда включено, передача в индексе в вектор предопределенного PRFs. Установите предопределенный PRFs использование параметра Pulse repetition frequency (Hz).
Если не включенный, циклы блока через вектор PRFs заданы параметром Pulse repetition frequency (Hz). Если Pulse repetition frequency (Hz) является скаляром, PRF является постоянным.
Output signal format — Формат выходного сигналаPulses (значение по умолчанию) | SamplesФормат выходного сигнала в виде Pulses или Samples.
Если вы устанавливаете этот параметр на Samples, выход блока состоит из нескольких выборок. Количество выборок является значением параметра Number of samples in output.
Если вы устанавливаете этот параметр на Pulses, выход блока состоит из нескольких импульсов. Количество импульсов является значением параметра Number of pulses in output.
Number of samples in output — Количество выборок в выходеКоличество выборок в блоке выводится в виде положительного целого числа.
Пример: 1000
Чтобы включить этот параметр, установите параметр Output signal format на Samples.
Типы данных: double
Number of pulses in output — Количество импульсов в выходеКоличество импульсов в блоке выводится в виде положительного целого числа.
Пример 2
Чтобы включить этот параметр, установите параметр Output signal format на Pulses.
Типы данных: double
Effective transmitted power (W) — радиолокационная система эффективная переданная степеньЭффективная излучаемая мощность (ERP) радиолокационной системы в виде положительной скалярной величины. Модули находятся в ваттах.
Пример: 3500
Типы данных: double
Radar height (m) — Высота радара выше поверхностиВысота радара выше поверхности в виде неотрицательного скаляра. Модули исчисляются в метрах.
Пример: 50
Типы данных: double
Radar speed (m/s) — Радарная скорость платформыРадарная скорость платформы в виде неотрицательного скаляра. Модули исчисляются в метрах в секунду.
Пример 5
Типы данных: double
Radar motion direction (deg) — Направление движения радарной платформыЗадайте направление радарного движения платформы как 2 1 вектор действительных чисел в форме [AzimuthAngle;ElevationAngle]. Модули в градусах. И азимут и угол вертикального изменения измеряются в системе локальной координаты радара антенная или антенная решетка. Угол азимута должен быть между-180 ° и 180 °. Угол вертикального изменения должен быть между-90 ° и 90 °.
Значение по умолчанию этого параметра указывает, что радарная платформа перемещает перпендикуляр в радарное поперечное направление антенной решетки.
Пример: [25;30]
Типы данных: double
Broadside depression angle (deg) — Угол депрессии антенной решеткиУгол депрессии радарной антенной решетки относительно разворота в виде скаляра. Разворот задан как азимут нулевых степеней и вертикальное изменение нулевых степеней. Угол депрессии измеряется вниз от горизонтали. Модули в градусах.
Пример: -10
Типы данных: double
Input Pattern Coordinate System — Система координат пользовательского шаблона антенныaz-el (значение по умолчанию) | phi-thetaСистема координат пользовательского шаблона антенны, заданного az-el или phi-theta. Когда вы задаете az-el, используйте Azimuth angles (deg) и параметры Elevations angles (deg), чтобы задать координаты точек шаблона. Когда вы задаете phi-theta, используйте Phi angles (deg) и параметры Theta angles (deg), чтобы задать координаты точек шаблона.
Чтобы включить этот параметр, установите Element type на Custom Antenna.
Phi Angles (deg) — Угловые координаты Phi пользовательской диаграммы направленности антеннУглы Phi точек, в которых можно задать диаграмму направленности антенн, задайте как 1 с действительным знаком P вектором-строкой. P должен быть больше 2. Угловые модули в градусах. Углы Phi должны находиться между 0 ° и 360 ° и быть в строго увеличивающемся порядке.
Чтобы включить этот параметр, установите параметр Element type на Custom Antenna и параметр Input Pattern Coordinate System к phi-theta.
Theta Angles (deg) — Угловые координаты теты пользовательской диаграммы направленности антеннУглы теты точек, в которых можно задать диаграмму направленности антенн, задайте как 1 с действительным знаком Q вектором-строкой. Q должен быть больше 2. Угловые модули в градусах. Углы теты должны находиться между 0 ° и 360 ° и быть в строго увеличивающемся порядке.
Чтобы включить этот параметр, установите параметр Element type на Custom Antenna и параметр Input Pattern Coordinate System к phi-theta.
MatchArrayNormal — Вращайте элемент антенны, чтобы выстроить нормальныйon (значение по умолчанию) | offУстановите этот флажок, чтобы вращать шаблон элемента антенны, чтобы выровняться с нормальным массивом. Если не выбранный, шаблон элемента не вращается.
Когда антенна используется в антенной решетке, и параметром Input Pattern Coordinate System является az-el, установка этого флажка вращает шаблон так, чтобы x - ось системы координат элемента указала вдоль нормального массива. Выбор использует шаблон элемента без вращения.
Когда антенна используется в антенной решетке, и Input Pattern Coordinate System установлен в phi-theta, установка этого флажка вращает шаблон так, чтобы z - ось системы координат элемента указала вдоль нормального массива.
Используйте параметр в сочетании с параметром Array normal URA и UCA массивы.
Чтобы включить этот параметр, установите Element type на Custom Antenna.
Размерности массива URA в виде положительного целого числа или вектора 1 на 2 положительных целых чисел.
Если Array size является вектором 1 на 2, вектор имеет форму [NumberOfArrayRows,NumberOfArrayColumns].
Если Array size является целым числом, массив имеет одинаковое число строк и столбцы.
Когда вы устанавливаете Specify sensor array as на Replicated subarray, этот параметр применяется к каждому подмассиву.
Для URA элементы массива индексируются сверху донизу вдоль крайнего левого столбца, и затем продолжаются к следующим столбцам слева направо. В этом рисунке, значении Array size [3,2] создает массив, имеющий три строки и два столбца.
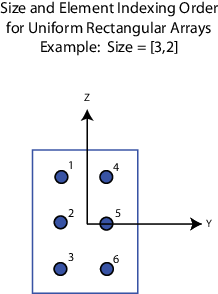
Чтобы включить этот параметр, установите Geometry на URA.
Прямоугольный размер сетки подмассива в виде одного положительного целого числа или 1 2 вектор-строка из положительных целых чисел.
Если Grid size является целочисленным скаляром, массив имеет равное количество подмассивов в каждой строке и столбце. Если Grid size является вектором 1 на 2 формы [NumberOfRows, NumberOfColumns], первая запись является количеством подмассивов вдоль каждого столбца. Вторая запись является количеством подмассивов в каждой строке. Строка приезжает локальный y - ось, и столбец приезжает локальный z - ось. Рисунок здесь показывает, как можно реплицировать 3 2 подмассив URA с помощью Grid size [1,2].
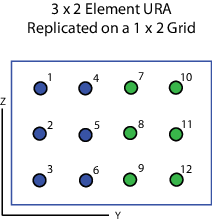
Чтобы включить этот параметр, установите Sensor array на Replicated subarray и Subarrays layout к Rectangular.
