Pressure-Compensated Pump (IL)
Постоянное давление, насос переменного смещения в изотермической жидкой сети
Описание
Блок Pressure-Compensated Pump (IL) моделирует постоянное давление, насос переменного смещения в изотермической жидкой сети. Перемещением насоса управляет дифференциальное давление, измеренное между портами X и Y. Когда это давление превышает Set pressure differential, жидкое смещение настроено согласно насосу Leakage and friction parameterization. Функциональность переменного смещения происходит в Pressure regulation range между пользовательскими максимальными и минимальными пределами смещения насоса.
Жидкость может переместиться от порта A до порта B, названного прямым режимом, или от порта B до порта A, названного реверсным режимом. Операция режима насоса происходит, когда существует перепад давления в направлении потока. Моторная операция режима происходит, когда существует перепад давления в направлении потока.
Вращение вала соответствует знаку объема жидкости, перемещающегося через насос. Положительное жидкое смещение соответствует положительному вращению вала в прямом режиме. Отрицательное жидкое смещение соответствует отрицательной угловой скорости вала в прямом режиме.
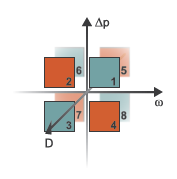
Блок имеет восемь режимов работы. Рабочий режим зависит от перепада давления от порта A до порта B, Δp = p B – p A; скорость вращения, ω = ω R – ω C; и жидкое объемное смещение, установленное перепадом давления. Фигура выше сопоставляет эти режимы с октантами Δp-ω-D график:
Режим 1, Прямой насос: Положительная угловая скорость вала вызывает увеличение давления от порта A до порта B, и теките из порта A к порту B.
Режим 2, Реверсивный мотор: Теките из порта B к причинам порта A уменьшение давления от B до A и отрицательной угловой скорости вала.
Режим 3, Реверсивный насос: Отрицательная угловая скорость вала вызывает увеличение давления от порта B до порта A, и теките из B к A.
Режим 4, Прямое движение: Теките из порта A к причинам B уменьшение давления от A до B и положительной угловой скорости вала.
Режим 5, Реверсивный мотор: Теките из порта B к причинам порта A уменьшение давления от B до A и положительной угловой скорости вала.
Режим 6, Прямой насос: Отрицательная угловая скорость вала вызывает увеличение давления от A до B, и теките из A к B.
Режим 7, Прямое движение: Теките из порта A к причинам B уменьшение давления от A до B и отрицательной угловой скорости вала.
Режим 8, Реверсивный насос: Положительная угловая скорость вала вызывает увеличение давления от порта B до порта A, и теките из B к A.
Блок имеет аналитичный, интерполяционная таблица и параметризация физического сигнала. При использовании табличных данных или входного сигнала для параметризации, можно принять решение охарактеризовать работу насоса на основе КПД или потерь.
Пороговый Pressure gain threshold for pump-motor transition параметров, Angular velocity threshold for pump-motor transition и Displacement threshold for pump-motor transition идентифицируют области, где численно сглаживавший переход потока между насосом операционные режимы может произойти. При давлении и порогах скорости вращения, выберите область перехода, которая обеспечивает некоторое поле для срока перехода, но которая мала достаточно относительно типичного перепада давления насоса и скорости вращения так, чтобы это не влияло на результаты вычисления. Для порога смещения выберите пороговое значение, которое меньше, чем типичный рабочий объем во время нормального функционирования.
Аналитический Leakage and friction parameterization
Если вы устанавливаете Leakage and friction parameterization на Analytical, блок вычисляет утечку и трение от постоянных значений для скорости вала, перепада давления и крутящего момента. Уровень утечек, который коррелируется с перепадом давления по насосу, вычисляется как:
где:
Именем Δp является p B – p A.
ρ в среднем является средней плотностью жидкости.
K является коэффициентом Хагена-Пуазейля за аналитическую потерю,
где:
Именем D является Nominal displacement.
Именем ω является Nominal shaft angular velocity.
Именем η является Volumetric efficiency at nominal conditions.
Момент трения, который связан с перепадом давления насоса, вычисляется как:
где:
τ 0 является No-load torque.
k является Friction torque vs. pressure gain coefficient at nominal displacement.
ω является относительной угловой скоростью вала, или .
Параметризация табличных данных
При использовании табличных данных для КПД насоса или потерь, можно обеспечить данные для одного или нескольких из насоса операционные режимы. Знаки табличных данных определяют операционный режим блока. Когда данные обеспечиваются меньше чем для восьми операционных режимов, блок вычисляет данные о дополнении для другого режима (режимов) путем расширения определенных данных в остающиеся октанты.
Tabulated data - volumetric and mechanical efficiencies параметризация
Уровень утечек вычисляется как:
где:
и η v является объемным КПД, который интерполирован от обеспеченных пользователями табличных данных. Срок перехода, α,
где:
Момент трения вычисляется как:
где:
и η m является механическим КПД, который интерполирован от обеспеченных пользователями табличных данных.
Tabulated data - volumetric and mechanical losses параметризация
Уровень утечек вычисляется как:
где потеря q интерполирована от параметра Volumetric loss table, q_loss(dp,w,D), который основан на предоставленных пользователями данных для перепада давления, угловой скорости вала и жидкого объемного смещения.
Момент трения вала вычисляется как:
где потеря τ интерполирована от параметра Mechanical loss table, torque_loss(dp,w,D), который основан на предоставленных пользователями данных для перепада давления, угловой скорости вала и жидкого объемного смещения.
Параметризация входного сигнала
Когда вы выбираете Input signal - volumetric and mechanical efficiencies, порты EV и EM включены. Внутренняя утечка и трение вала вычисляются таким же образом как Tabulated data - volumetric and mechanical efficiencies параметризация, за исключением того, что η v и η m получены непосредственно в портах EV и EM, соответственно.
Когда вы выбираете Input signal - volumetric and mechanical losses, порты LV и LM включены. Эти порты получают утечку и момент трения как положительные физические сигналы. Уровень утечек вычисляется как:
где:
LV q является утечкой, полученной в порте LV.
p молотит, параметр Pressure gain threshold for pump-motor transition.
Момент трения вычисляется как:
где
τ LM является моментом трения, полученным в порте LM.
ω молотит, параметр Angular velocity threshold for pump-motor transition.
Объемная область значений и область значений механического КПД между пользовательскими заданными минимальными и максимальными значениями. Любые значения ниже или выше, чем эта область значений возьмут минимальные и максимальные заданные значения, соответственно.
Накачайте операцию
Скорость потока жидкости насоса:
где
Крутящий момент насоса:
где
Механическая энергия, обеспеченная валом насоса:
и гидравлическая мощность насоса:
Чтобы быть уведомленным, если блок действует вне предоставленных табличных данных, устанавливает Check if operating beyond the octants of supplied tabulated data на Warning получить предупреждение, если это происходит, или Error остановить симуляцию, когда это происходит. Для параметризации входным сигналом за объемные или механические потери вы можете быть уведомлены, если симуляция превосходит рабочие режимы параметром Check if operating beyond pump mode.
Можно также контролировать функциональность насоса. Установите Check if pressures are less than pump minimum pressure на Warning получить предупреждение, если это происходит, или Error остановить симуляцию, когда это происходит.
Параметризация смещения
Линейная параметризация перемещения насоса:
где нормированное давление, ,
когда давление в Pressure regulation range.
Динамика смещения
Если движущие силы смещения моделируются, задержка введена ответу потока на смоделированный, контролируют давление. управление p становится динамическим давлением управления, p dyn; в противном случае управление p является установившимся давлением. Мгновенное изменение в динамическом давлении управления вычисляется на основе Time constant, τ:
По умолчанию Displacement dynamics установлен в Off.
Порты
Сохранение
развернуть все
A — Жидкий порт
изотермическая жидкость
Запись или выходной порт жидкости к или от насоса.
B — Жидкий порт
изотермическая жидкость
Запись или выходной порт жидкости к или от насоса.
X — Ссылка давления P x, MPa
изотермическая жидкость
Контролируйте давление в модулях МПа, обозначил P x. Давление управления, P x – P y, сравнено с Set pressure differential, чтобы инициировать или модерировать переменное перемещение насоса.
Y — Ссылка давления P y, MPa
изотермическая жидкость
Контролируйте давление в модулях МПа, обозначил P y. Давление управления, P x – P y, сравнено с Set pressure differential, чтобы инициировать или модерировать переменное перемещение насоса.
R — Механический порт
вращательное механическое устройство
Вращение угловой скорости вала и крутящего момента.
C — Механический порт
вращательное механическое устройство
Накачайте случающуюся ссылочную скорость вращения и крутящий момент.
EV — Объемный КПД
физический сигнал
Накачайте КПД для жидкого смещения в виде физического сигнала. Значение должно быть между 0 и 1.
Зависимости
Чтобы включить этот порт, установите Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies.
EM — Механический КПД
физический сигнал
Накачайте КПД для механического предоставления энергии в виде физического сигнала. Значение должно быть между 0 и 1.
Зависимости
Чтобы включить этот порт, установите Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies.
LV — Уровень утечек, m^3/s
физический сигнал
Накачайте потери, сопоставленные с жидким смещением в m3/s в виде физического сигнала.
Зависимости
Чтобы включить этот порт, установите Leakage and friction parameterization на Input signal - volumetric and mechanical losses.
LM — Момент трения, N*m
физический сигнал
Накачайте потери, сопоставленные с механическим предоставлением энергии в N*m в виде физического сигнала.
Зависимости
Чтобы включить этот порт, установите Leakage and friction parameterization на Input signal - volumetric and mechanical losses.
Параметры
развернуть все
Насос
Leakage and friction parameterization — Метод вычисления уровня утечек и момента трения
Analytical (значение по умолчанию) | Tabulated data - volumetric and mechanical efficiencies | Tabulated data - volumetric and mechanical losses | Input signal - volumetric and mechanical efficiencies | Input signal - volumetric and mechanical losses
Параметризация характеристик утечки и трения насоса.
В Analytical параметризация, уровень утечек и момент трения вычисляются аналитическими уравнениями.
В Tabulated data - volumetric and mechanical efficiencies параметризация, объемное и механический КПД вычислены от предоставленного пользователями Pressure gain vector, dp, Shaft angular velocity vector, w и параметров Displacement vector, D и интерполированы из 3-D таблиц Volumetric efficiency table, e_v(dp,w,D) и Mechanical efficiency table, e_m(dp,w,D).
В Tabulated data - volumetric and mechanical losses параметризация, уровень утечек и момент трения вычислены от предоставленного пользователями Pressure gain vector, dp, Shaft angular velocity vector, w и параметров Displacement vector, D и интерполированы от 3-D Volumetric loss table, q_loss(dp,w,D) и параметров Mechanical loss table, torque_loss(dp,w,D).
В Input signal - volumetric and mechanical efficiencies параметризация, объемное и механический КПД получены как физические сигналы в портах EV и EM, соответственно.
В Input signal - volumetric and mechanical loss параметризация, уровень утечек и момент трения получены как физические сигналы в портах LV и LM, соответственно.
Nominal displacement — Смещение жидкости фиксированного объема
30 cm^3/rev (значение по умолчанию) | скаляр
Количество жидкости перемещено валом, вращающимся под номинальными условиями работы.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Analytical.
Nominal shaft angular velocity — Угловая скорость вала
188 rad/s (значение по умолчанию) | скаляр
Скорость вращения вала под номинальными условиями работы.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Analytical.
Nominal pressure gain — Перепад давления между жидким входом и выходом
10 MPa (значение по умолчанию) | скаляр
Накачайте перепад давления между жидким входом и выходом под номинальными условиями работы.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Analytical.
Volumetric efficiency at nominal conditions — Отношение фактической скорости потока жидкости к идеальной скорости потока жидкости
0.92
Отношение фактической скорости потока жидкости к идеальной скорости потока жидкости при номинальных условиях.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Analytical.
No-load torque — Базовый крутящий момент
0.05 N*m (значение по умолчанию) | скаляр
Минимальное значение крутящего момента, чтобы преодолеть трение изоляции и вызвать движение вала.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Analytical.
Friction torque vs. pressure gain coefficient at nominal displacement — Коэффициент пропорциональности между моментом трения и перепадом давления насоса
0.6 m*N/MPa (значение по умолчанию) | положительная скалярная величина
Коэффициент пропорциональности между моментом трения и перепадом давления насоса.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Analytical.
Pressure gain vector, dp — Вектор данных о давлении для параметризации табличных данных
[.1, 1, 2] MPa (значение по умолчанию) | 1 n вектором
Вектор значений перепада давления для табличной параметризации утечки и трения крутящего момента. Этот вектор формирует независимую ось с Shaft angular velocity vector, w и параметрами Displacement vector, D для 3-D зависимого Volumetric efficiency table, e_v(dp,w,D) и параметрами Mechanical efficiency table, e_m(dp,w,D). Векторные элементы должны быть перечислены в порядке возрастания.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на также:
Shaft angular velocity vector, w — Вектор данных о скорости вращения для параметризации табличных данных
[25, 50, 100, 200, 300, 400] rad/s (значение по умолчанию) | 1 n вектором
Вектор данных о скорости вращения для табличной параметризации утечки и трения крутящего момента. Этот вектор формирует независимую ось с Pressure gain vector, dp и параметрами Displacement vector, D для 3-D зависимого Volumetric efficiency table, e_v(dp,w,D) и параметрами Mechanical efficiency table, e_m(dp,w,D). Векторные элементы должны быть перечислены в порядке возрастания.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на также:
Displacement vector, D — Вектор рабочих объемов для параметризации табличных данных
[-30, -19, 19, 30] cm^3/s (значение по умолчанию) | 1 n вектором
Вектор жидких объемных данных о смещении для табличной параметризации утечки и трения крутящего момента. Этот вектор формирует независимую ось с Shaft angular velocity vector, w и параметрами Pressure gain vector, dp для 3-D зависимого Volumetric efficiency table, e_v(dp,w,D) и параметрами Mechanical efficiency table, e_m(dp,w,D). Векторные элементы должны быть перечислены в порядке возрастания.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на также:
Volumetric efficiency table, e_v(dp,w,D) — Объемный КПД для параметризации табличных данных
repmat([.816, .908, .954, .977, .981, .984; .325, .663, .831, .916, .925, .946; .137, .568, .78, .892, .893, .91], 1, 1, 4) (значение по умолчанию) | M-by-N-by-P матрица
M-by-N-by-P матрица объемных КПД в заданном давлении жидкости, угловой скорости вала и объемном смещении. Линейная интерполяция используется между табличными элементами. M, N и P являются размерами соответствующих векторов:
M является количеством векторных элементов в параметре Pressure gain vector, dp.
N является количеством векторных элементов в параметре Shaft angular velocity vector, w.
P является количеством векторных элементов в параметре Displacement vector, D.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical efficiencies.
Mechanical efficiency table, e_m(dp,w,D) — Механический КПД для параметризации табличных данных
repmat([.996, .996, .996, .996, .996, .996; .988, .989, .989, .989, .989, .99; .981, .981, .982, .982, .983, .984], 1, 1, 4) (значение по умолчанию) | M-by-N-by-P матрица
M-by-N-by-P матрица механического КПД в заданном давлении жидкости, угловой скорости вала и смещении. Линейная интерполяция используется между табличными элементами. M, N и P являются размерами соответствующих векторов:
M является количеством векторных элементов в параметре Pressure gain vector, dp.
N является количеством векторных элементов в параметре Shaft angular velocity vector, w.
P является количеством векторных элементов в параметре Displacement vector, D.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical efficiencies.
Volumetric loss table, q_loss(dp,w,D) — Объемные потери для параметризации табличных данных
repmat([.023, .023, .023, .023, .0285, .032; .0844, .0842, .0845, .084, .1125, .108; .1079, .108, .11, .108, .1605, .18] * 1e-3, 1, 1, 4)м^3/c (значение по умолчанию) | числовой массив
M-by-N-by-P матрица объемной утечки в заданном давлении жидкости, угловой скорости вала и смещении. Линейная интерполяция используется между табличными элементами. M, N и P являются размерами соответствующих векторов:
M является количеством векторных элементов в параметре Pressure gain vector, dp.
N является количеством векторных элементов в параметре Shaft angular velocity vector, w.
P является количеством векторных элементов в параметре Displacement vector, D.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical loss.
Mechanical loss table, torque_loss(dp,w,D) — Механические потери для параметризации табличных данных
repmat([.002, .002, .002, .002, .002, .002; .0607, .0556, .0556, .0556, .0556, .0505; .1937, .1937, .1833, .1833, .1729, .1626], 1, 1, 4) N*m (значение по умолчанию) | числовой массив
M-by-N-by-P матрица момента трения в заданном давлении жидкости, угловой скорости вала и смещении. Линейная интерполяция используется между табличными элементами. M, N и P являются размерами соответствующих векторов:
M является количеством векторных элементов в параметре Pressure gain vector, dp.
N является количеством векторных элементов в параметре Shaft angular velocity vector, w.
P является количеством векторных элементов в параметре Displacement vector, D.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Tabulated data - volumetric and mechanical loss.
Minimum volumetric efficiency — Минимальное значение объемного КПД
1e-3 (значение по умолчанию) | положительная скалярная величина в области значений (0,1]
Минимальное значение объемного КПД. Если входной сигнал ниже этого значения, объемный КПД установлен в минимальный объемный КПД.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies.
Maximum volumetric efficiency — Максимальное значение объемного КПД
1
Максимальное значение объемного КПД. Если входной сигнал выше этого значения, объемный КПД установлен в максимальный объемный КПД.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies.
Minimum mechanical efficiency — Минимальное значение механического КПД
1e-3 (значение по умолчанию) | положительная скалярная величина в области значений (0,1]
Минимальное значение механического КПД. Если входной сигнал ниже этого значения, механический КПД установлен в минимальный механический КПД.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies.
Maximum mechanical efficiency — Максимальное значение механического КПД
1
Максимальное значение механического КПД. Если входной сигнал выше этого значения, механический КПД установлен в максимальный механический КПД.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Input signal - volumetric and mechanical efficiencies.
Pressure gain threshold for pump-motor transition — Порог давления для перехода режима
1e-3 MPa (значение по умолчанию) | положительная скалярная величина
Пороговое значение перепада давления для перехода между насосом и моторной функциональностью. Область перехода задана приблизительно 0 МПа между положительными и отрицательными величинами порога перепада давления. В этой области перехода вычисленный уровень утечек и момент трения настроены согласно термину перехода α, чтобы гарантировать плавный переход от одного режима до другого.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на также:
Tabulated data - volumetric and mechanical efficiencies
Input signal - volumetric and mechanical efficiencies
Input signal - volumetric and mechanical losses
Angular velocity threshold for pump-motor transition — Порог скорости вращения для перехода режима
10 rad/s (значение по умолчанию) | положительная скалярная величина
Значение пороговой угловой скорости для перехода между функциональностью двигателя и насоса. Область перехода задана приблизительно 0 рад/с между положительными и отрицательными величинами порога скорости вращения. В этой области перехода вычисленный уровень утечек и момент трения настроены согласно термину перехода α, чтобы гарантировать плавный переход от одного режима до другого.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на:
Tabulated data - volumetric and mechanical efficiencies
Input signal - volumetric and mechanical efficiencies
Input signal - volumetric and mechanical loss
Check if operating beyond the octants of supplied tabulated data — Уведомить ли, если степени данных, которыми снабжают, превзойдены
None (значение по умолчанию) | Warning | Error
Уведомить ли, если степени данных, которыми снабжают, превзойдены. Выберите Warning чтобы уведомить, когда блок использует значения вне предоставленной области значений данных. Выберите Error остановить симуляцию, когда блок использует значения вне предоставленной области значений данных.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на:
Check if operating beyond pump mode — Уведомить ли, если блок действует за пределами функциональности режима насоса
None (значение по умолчанию) | Warning | Error
Уведомить ли, если блок действует за пределами функциональности режима насоса. Выберите Warning чтобы уведомить, когда блок действует в режимах реверсивного мотора или форварде. Выберите Error остановить симуляцию, когда блок действует в режимах реверсивного мотора или форварде.
Зависимости
Чтобы включить этот параметр, установите Leakage and friction parameterization на Input signal - volumetric and mechanical losses.
Check if pressures are less than pump minimum pressure — Уведомить ли, если жидкость выходит, давление является низким
None (значение по умолчанию) | Warning | Error
Уведомить ли, если жидкость в порте A или B испытывает низкое давление. Выберите Warning чтобы уведомить, когда давление выхода падает ниже минимально заданного значения. Выберите Error остановить симуляцию, когда давление выхода падает ниже минимально заданного значения.
Параметр помогает идентифицировать потенциальные условия для кавитации, когда жидкое давление падает ниже жидкого давления пара.
Pump minimum pressure — Более низкий порог приемлемого давления при выходе насоса
0.101325 MPa (значение по умолчанию) | положительная скалярная величина
Более низкий порог приемлемого давления во входном отверстии насоса или выхода.
Зависимости
Чтобы включить этот параметр, установите Check if pressures are less than pump minimum pressure на:
Компенсация давления
Maximum displacement — Верхний предел перемещению насоса
30 cm^3/rev (значение по умолчанию) | скаляр
Верхний предел перемещению насоса.
Minimum displacement — Нижний предел к перемещению насоса
0.1 cm^3/rev (значение по умолчанию) | скаляр
Нижний предел к перемещению насоса.
Set pressure differential — Пороговое значение для функциональности переменного смещения
10 MPa (значение по умолчанию) | положительная скалярная величина
Пороговое значение, вне которого настроено перемещение насоса.
Pressure regulation range — Переменное смещение операционная область значений
0.6 MPa (значение по умолчанию) | положительная скалярная величина
Переменное смещение операционная область значений. Область значений регулирования давления находится между Set pressure differential и давлением максимума насоса.
Displacement dynamics — Объяснить ли ответ потока на изменения смещения
Off (значение по умолчанию) | On
Объяснить ли переходные эффекты к гидросистеме из-за изменений в смещении жидкости насоса. Установка Displacement dynamics к On аппроксимирует изменение условия путем представления задержки первого порядка в ответе потока. Величина Time constant также влияет на смоделированную динамику смещения.
Time constant — Постоянное время отклика потока
0.1 s (значение по умолчанию) | положительная скалярная величина
Постоянный, который получает время, требуемое для жидкости достигнуть установившийся при изменении жидкого смещения. Этот параметр влияет на смоделированную динамику смещения.
Введенный в R2020a