Датчик движения в системах вращательного механического устройства
Simscape / Библиотека Основы / Механическое устройство / Механические Датчики

Блок Ideal Rotational Motion Sensor представляет идеальный датчик движения вращательного механического устройства, то есть, устройство, которое преобразует через переменную, измеренную между двумя узлами вращательного механического устройства в управляющий сигнал, пропорциональный скорости вращения или углу. Можно задать начальное угловое положение (смещение) как параметры блоков.
Датчик идеален, поскольку он не составляет инерцию, трение, задержки, потребление энергии, и так далее.
Связи R и C являются портами сохранения вращательного механического устройства, которые соединяют блок с узлами, движение которых проверяется. Связи W и A являются выходными портами физического сигнала для скорости и углового смещения, соответственно.
Положительное направление блока от порта R до порта C. Это означает, что скорость измеряется как ω = ω R – ω C, где ω R, ω C является абсолютными скоростями вращения в портах R и C, соответственно.
Параметр Wrap angle to [0, 2*pi] позволяет вам управлять угловым смещением выходная область значений. Когда установлено в On, это сохраняет угловое смещение в диапазоне от 0 до 2π радианы (360 градусов), независимо от количества оборотов выполняемый объектом и направлением вращения. Когда установлено в Off, выходная область значений неограниченна.
Фигура демонстрирует различие между этими двумя опциями.
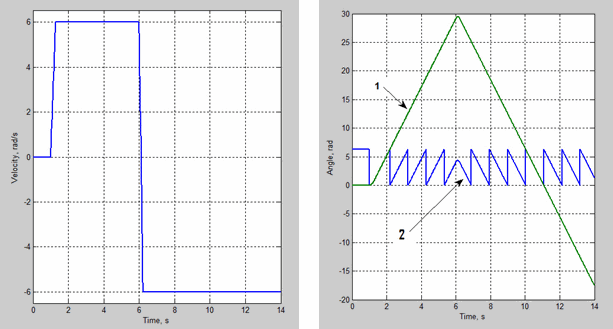
В этом примере объект вращается с 6 рад/с в положительное направление в течение первых 5 секунд, и затем переключается на отрицательное направление на той же скорости. Угловой выход смещения по умолчанию (линия 1) показывает, что объект повернулся вперед 30 рад и затем возвращенный в обратном направлении, продолжившись до –20 рад. Если вы устанавливаете Wrap angle to [0, 2*pi] на On, выход (линия 2) остается в диапазоне от 0 до 2π рад.
Установка параметра Wrap angle to [0, 2*pi] на On упрощает разработку моделей с комплексным отношением между параметрами модели и углом поворота, такими как насосы и двигатели.


