Источник и приемник ремня в системе шкивов
Simscape / Мультитело / Пояса и Кабели

Блок Belt-Cable Spool представляет цилиндрический барабан, на котором можно виться (и от которого можно успокоиться), ремень системы шкивов. Золотник отмечает конец проводу и точке, в которой двигатель или другой источник питания часто надевают загрузку. Блок Belt-Cable End обычно отмечает второй конец ремня, к которому обычно присоединяется сама загрузка. В зависимости от того, вьется ли это или раскручивается, золотник может вести себя как бесконечный источник провода или как бесконечный приемник того же самого.
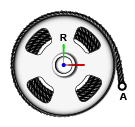
Золотник служит интерфейсом между ремнем, зависящим от домена к системам шкивов и областью системы координат, общей ко всем другим компонентам мультитела. Порт ремня (A) идентифицирует конец ремня, чтобы быть раной на золотнике и относительном размещении того совета в системе шкивов. Порт системы координат (R) идентифицирует систему координат золотника и его размещения в более широкой модели мультитела.
Степени свободы золотника являются функцией соединения, которым золотник соединяется с другими компонентами. Шарнирному соединению свойственно обеспечить те степени свободы; они уменьшают в этом случае до вращения вокруг одной оси (тот из золотника). Входные параметры приведения в действие, заданные непосредственно через соединение посредством крутящего момента или сигналов движения, служат, чтобы управлять золотником и виться (или раскрутиться) провод.
Провод вводит и выходит из барабана в касании с окружностью барабана. В соответствии с правилом правой руки, обмотка находится в направлении против часовой стрелки об оси вращения барабана. Эта ось является по определению осью z системы координат локальной ссылки (R). Чтобы инвертировать направление обмотки, необходимо инвертировать систему координат локальной ссылки так, чтобы ось z указала в противоположном направлении — например, приложением вращения системы координат через блок Rigid Transform.
Поверхность золотника (сглаженный или с канавками) не рассматривается в модели. Кроме того, провод принят, чтобы перенести золотник в кругу, который имеет постоянный радиус (тот из круга подачи) и компланарный с поперечным сечением лебедки. Изменения в радиусе золотника из-за обмотки проигнорированы.
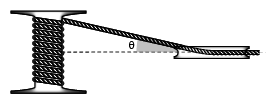
По умолчанию провод может ввести и выйти из золотника под углом к его центральной плоскости (θ в фигуре). Этот угол может варьироваться в процессе моделирования — например, из-за перевода золотника на призматическом соединении. В то время как контактная точка всегда находится в центральной плоскости золотника, золотник может переместиться, когда смонтировано в соединение. Провод может также быть ограничен ввести и выйти из золотника в его центральной плоскости. Осуществляется ли это ограничение, зависит от настроек блока Belt-Cable Properties.
Инерция золотника и раны провода на нем также проигнорирована. Чтобы получить инерцию золотника фиксированной массы, используйте блок Cylindrical Solid или Inertia. Рассмотрите блок Cylindrical Solid, если геометрия тела важна в модели. Чтобы получить переменные массовые свойства провода как, он вьется на и раскручивается от, золотник, используйте блок из библиотеки Variable Solids — например, Variable Cylindrical Solid или General Variable Mass.
