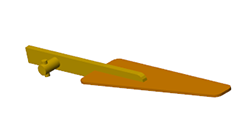
Часто более просто задать атрибуты нескольких простых твердых частиц, чем те из одного комплексного тела. Соединение является стратегией моделирования, посредством чего можно смоделировать тело как комбинацию более простых элементов тела. Можно использовать соединение, чтобы получить сложные геометрии и инерцию, что вы не можете в противном случае (или легко) задают. RightWing тело в sm_cam_flapping_wing модель, например, является продуктом этой стратегии моделирования.
Пример составного тела
Объедините три общих формы Extruded Solid с помощью блоков Rigid Transform, чтобы задать фиксированные пространственные отношения между общими твёрдыми системами координат. Результатом этого примера не является просто составная геометрия тела — это - составное тело. Необходимо использовать сознательно неполную модель smdoc_compound_link это по умолчанию идет с вашей установкой Simscape Multibody.
Запустите путем исследования smdoc_compound_link модель и переменные геометрии задали в ее рабочей области:
В командной строке MATLAB введите имя модели в качестве примера, smdoc_compound_link. Модель открывается. В нем шесть несвязанных блоков — три твердых блока, два Rigid Transform и один Solver Configuration.
Твердые блоки представляют элементарные разделы бинарной ссылки, и Rigid Transform блокирует пространственные отношения между твердыми системами координат. Блок Solver Configuration требуется только для визуализации в Mechanics Explorer.
Во вкладке Modeling нажмите Model Explorer. Model Explorer является инструментом Simulink, который можно использовать, чтобы исследовать рабочее пространство модели. Все соответствующие размеры твёрдых тел, включая общие поперечные сечения Extruded Solid, заданы там.
В панели Model Hierarchy, расположенной слева, расширяют узел, названный в честь вашей модели, и выбирают подузел Model Workspace. Панель Model Workspace открывается справа предварительно заполненный несколькими линиями кода MATLAB.
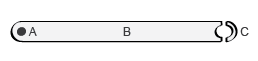
% Body Geometry Parameters l = 20; % Hole-to-hole distance w = 2; % Link width d = 1.2; % Hole diameter t = 1; % Link thickness % Main Solid Cross-section: A = linspace(-pi/2,pi/2)'; B = linspace(pi/2,-pi/2)'; csRight = [l/2+w/2*cos(A) w/2*sin(A)]; csLeft = [-l/2 w/2; -l/2 + d/2*cos(B) d/2*sin(B); -l/2 -w/2]; csMain = [csRight; csLeft]; % Hole Solid Cross-section: C = linspace(pi/2,3*pi/2)'; D = linspace(3*pi/2,pi/2)'; csHole = [w/2*cos(C) w/2*sin(C); d/2*cos(D) d/2*sin(D)];
Этот код задает [x, y] координаты Общих поперечных сечений Extruded Solid. Поперечные сечения параметрируются в терминах соответствующих размеров твёрдых тел, а именно, длина, ширина и диаметр отверстия. Обратите внимание на размеры звена, указанные в коде. Расстояние между отверстиями ссылки (переменная l), 20 в том, что позже будет модулями cm. Ширина ссылки (w) 2 и диаметр отверстия (d) 1.2 в тех же модулях.
Откройте диалоговые окна каждого твердого блока. Панель визуализации показывает геометрию тела, выведенную частично из кода в рабочем пространстве модели, соответствуя аналогичному блоку. Два твердых тела являются Extruded Solid блоками, а еще один - это блок Cylindrical Solid.
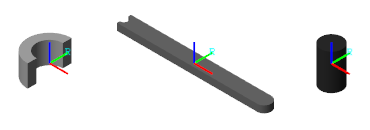
На панели инструментов панели визуализации нажмите Toggle visibility of frames
![]() кнопка. Панель визуализации отображает твердую систему координат. Размещение системы координат относительно геометрии тела становится важным при полагании, что твердое преобразовывает это, необходимо применяться между различными твердыми системами координат.
кнопка. Панель визуализации отображает твердую систему координат. Размещение системы координат относительно геометрии тела становится важным при полагании, что твердое преобразовывает это, необходимо применяться между различными твердыми системами координат.
Завершите модель путем твердого соединения твердых частиц и определения их пространственных отношений:
Соедините твердые блоки как показано в фигуре. Твердые системы координат, в настоящий момент только, совпадающие друг с другом.
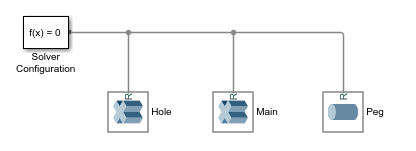
Пропустите блоки Rigid Transform на линии связи как показано в фигуре. Simulink автоматически соединяет порты системы координат с линиями связи.
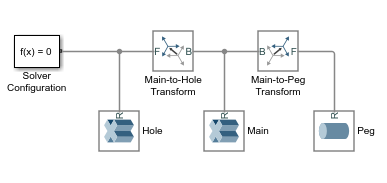
Обратите особое внимание на расположения порта — порты B должны оба стоять перед блоком Extruded Solid под названием Main. Зеркальное отражение подключений порта изменило бы относительное размещение твердых частиц в итоговом теле.
В диалоговом окне блока Rigid Transform под названием Main-to-Hole Transform, задайте описанные ниже параметры Translation. Эти параметры описывают перевод половины бинарной длины ссылки вдоль-x оси основы (B) система координат — в этой модели, сохраненной совпадающей ссылкой (B) система координат тела под названием Main.
Method: Standard Axis
Ось: -X
Offset: l/2, модули cm
В диалоговом окне блока Rigid Transform под названием Main-to-Peg Transform, задайте описанные ниже параметры Translation. Эти параметры описывают перевод половины бинарной длины ссылки вперед +x-axis и перевод, равный бинарной толщине ссылки вперед +z-axis основы (B) система координат.
Method: Cartesian
Offset: [l/2 0 t], модули m
Во вкладке Modeling выберите Update Model. Mechanics Explorer открывается визуализацией двоичного файла, соединяют модель. Тело является составным — оно включает несколько твердых частиц — и может поэтому визуализироваться в целом с помощью Mechanics Explorer только. Для акцента твердые частицы показывают в различных оттенках серого.

Для примера, показывающего, как задать Общее поперечное сечение Extruded Solid, смотрите Попытку Оно: Задайте Простое Поперечное сечение. Поперечное сечение в том примере основано на подобном, хотя не идентичный, модель бинарной ссылки. Та ссылка обработана как простое тело — один смоделированный как одно тело — ни со штепселями, ни с отверстиями. Однако стратегия, продемонстрированная там, применяется к другим Общим поперечным сечениям Extruded Solid также. Для расширения того примера, показывающего, как включать отверстия в поперечное сечение, смотрите Попытку Оно: Задайте Поперечное сечение с Двумя Отверстиями.
Несмотря на то, что метод компаундирования чаще всего служит для представления сложной геометрии, он также служит и для представления сложных инерций. В частности, можно объединить инерцию положительной массы с инерцией отрицательной массы, эффективно вычитая одну из другой.
Используйте эту стратегию, чтобы вычесть инерцию, связанную с отверстием, из цилиндрического твердого тела, первоначально смоделированного без него. Изобразите плотные и пустые области, используя блоки Cylindrical Solid. Установите длину цилиндра равную 1 м, а радиус равным 0,25 м:
В командной строке MATLAB введите smnewОткроется новая модель, основанная на шаблоне Simscape Multibody. Модель содержит обычно используемые блоки и сконфигурирована с подходящими настройками решателя для моделей мультитела.
Добавьте два блока Cylindrical Solid и соедините их с блоками Solver Configuration. Линия связи между блоками делает их системы координат совпадающими в пространстве. Можно удалить оставшиеся блоки.
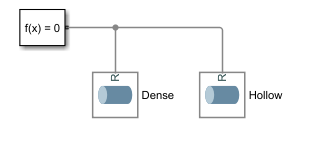
В диалоговом окне крайнего левого блока Cylindrical Solid, установленного параметр Radius на 0.25 m, и параметр Length к 1 m. Назовите этот блок Dense.
В диалоговом окне самого правого блока Cylindrical Solid, установленного параметр Radius на 0.20 m, и параметр Length к 1 m. Назовите этот блок Hollow.
Установите Inertia> параметр Density Hollow блокируйтесь к отрицанию значения, используемого в Dense блок: -1000 kg/m^3. Составное тело, представленное блоками Cylindrical Solid теперь, имеет инерцию полого цилиндра с калибром 0.2 m в радиусе.
Расширьте Inertia> узел Derived Values и нажмите кнопку Update, чтобы отобразить параметры инерции Hollow тело. Сделайте то же самое для Dense тело. Масса и моменты инерции имеют противоположные знаки, как и ожидалось с учетом входных параметров плотности.

