Можно импортировать модель блока CAD из программного обеспечения Onshape® в среду Simscape™ Multibody™. Процесс импорта происходит на двух шагах на основе smexportonshape и smimport функции. smexportonshape экспортирует модель блока в промежуточном XML, соответствующем XML-схеме Simscape Multibody. smimport функция преобразует промежуточный XML-файл в версию Simscape Multibody исходной модели Onshape.
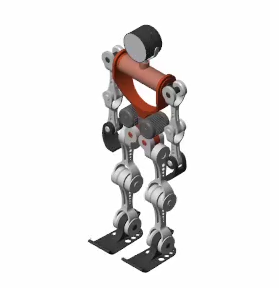
В этом примере показано, как импортировать модель Onshape гуманоидного блока робота. Модель включает различные части, представляющие туловище, голову и конечности робота. Части соединяются через Revolute помощники, которые представляют различные соединения. Модель идентична показанному в Импорте Гуманоидная Модель URDF. Введите следующий URL в свой веб-браузер, чтобы получить доступ к модели (требуемый вход в систему Onshape):
https://cad.onshape.com/documents/5817806f96eae5105bfa5085/w/15ab3bfb58cacbf427d77ff3/e/181493813f84966648a8db1b
Схематичная модель
Используйте smexportonshape функционируйте, чтобы экспортировать модель:
В командной строке MATLAB® перейдите к папке, для которой у вас есть привилегии записи — например:
cd C:\Users\JDoe\Documents\ModelsСохраните модель URL в переменной MATLAB под названием assemblyURL:
assemblyURL = 'https://cad.onshape.com/documents/5817806f96eae5105bfa5085/w/15ab3bfb58cacbf427d77ff3/e/181493813f84966648a8db1b';
Экспортируйте модель и сохраните имя XML-файла в переменной под названием exportedModel:
exportedModel = smexportonshape(assemblyURL);
Вам можно предложить войти в ваш аккаунт Onshape. smexportonshape функция генерирует файл описания мультитела XML для этой модели и набора файлов ШАГА для различных конфигураций части.
Используйте smimport функционируйте, чтобы импортировать файл описания мультитела XML:
smimport(exportedModel);
Функция генерирует модель Simscape Multibody гуманоидного робота.

Основывайтесь на модели, например, путем добавления систем управления, чтобы привести в движение различные соединения. Для управляемого примера, в командной строке MATLAB вводят sm_import_humanoid_urdf. Симулируйте модель, чтобы просмотреть простую анимацию.