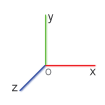
Системы координат являются триадами оси, которые кодируют положение и данные об ориентации в 3-D модели мультитела. Каждая триада состоит из трех перпендикулярных осей, которые пересекаются в начале координат. Источник определяет положение системы координат, и оси определяют ориентацию системы координат. На оси наносят цветную маркировку, с x - осью красного, y - оси зеленого цвета и z - ось синего цвета.
Каждый твердый компонент имеет одну или несколько локальных систем координат, к которым он твердо присоединяется. Путем расположения и ориентации систем координат компонента, вы располагаете и ориентируете сами компоненты. Это - роль систем координат в модели — чтобы позволить вам задать пространственные отношения между компонентами.
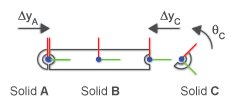
Порт системы координат идентифицирует локальную систему координат на компоненте. Например, порт системы координат R твердого блока идентифицирует систему координат локальной ссылки тела. Каждый блок имеет один или несколько портов системы координат, которые вы соединяете для того, чтобы определить местоположение связанных компонентов на пробеле. Рисунок показывает порты системы координат на нескольких из блоков Body Elements.

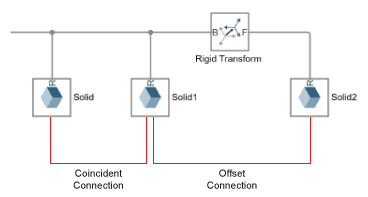
Связи между портами системы координат определяют пространственные отношения между своими системами координат. Прямая линия связи делает связанные системы координат совпадающими в пространстве. Блок Твердого Преобразования устанавливает вращательные и поступательные перемещения между системами координат. Рисунок показывает примеры совпадающих и связей системы координат смещения.
Совпадающее отношение между твердыми системами координат, отдельно, не составляет совпадающее отношение между геометрией тела. Пространственное расположение двух геометрии тела зависит не только от пространственного расположения соответствующих систем координат, но также и о том, как конфигурации заданы относительно тех систем координат.
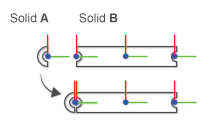
Если два конфигураций будут отличаться друг от друга, или если их положения и ориентации относительно их систем координат будут отличаться друг от друга, то создание совпадающих систем координат заставит геометрию тела быть возмещенной. В фигуре соединяя систему координат Тела к левой системе координат Тела B соединяет твердые частицы, таким образом, что их конфигурации возмещены друг от друга.
Блок Solid обеспечивает интерфейс создания системы координат, который можно использовать, чтобы создать новый, пользовательский, системы координат. Можно расположить и ориентировать пользовательскую систему координат, использующую функции геометрии, такие как вершины, ребра и поверхности. Более удобно с точки зрения инерции, можно сделать то же использование центра массы и трех основных осей тела.
Создайте пользовательскую систему координат с помощью интерфейса создания системы координат блока File Solid. Затем поместите систему координат в центре массы и выровняйте оси системы координат с основными осями инерции. Результатом является система координат, которая совпадает с основной системой координат — та, в которой матрица инерции является диагональной, и продуктами инерции является нуль.
В командной строке MATLAB введите smdoc_lbeam_inertia. Модель открывается телом, обладающим формой L-луча.
В диалоговом окне блока File Solid нажмите кнопку Create Frame. Диалоговое окно блока File Solid переключается на представление создания системы координат.
Измените параметр Frame Name в P (для “Основной Системы координат”). Панель визуализации и порт системы координат используют эту метку, чтобы идентифицировать вашу новую систему координат.
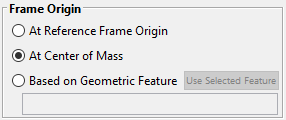
Под Frame Origin установите переключатель, пометил At Center of Mass.
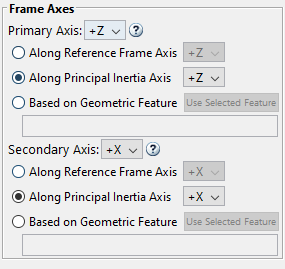
Под Frame Axes> Primary Axis и Frame Axes> Secondary Axis, установите переключатель, пометил Along Principal Inertia Axis. Примите опции оси по умолчанию (+Z и +X, соответственно), и нажимают Save. Диалоговое окно блока переключает назад на основное (параметры) представление.
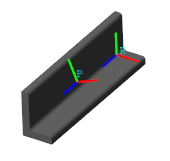
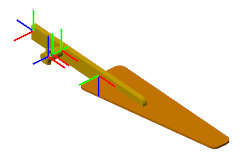
В панели инструментов визуализации нажмите кнопку Toggle visibility of frames. Панель визуализации показывает системы координат тела, включая вашу новую пользовательскую систему координат, P.
Вращательные и поступательные перемещения между системами координат называются, преобразовывает. Если преобразования являются постоянными в течение времени, они называются твердые. Твердые преобразования позволяют вам зафиксировать относительные положения и ориентации компонентов на пробеле, например, собрать твердые частицы в тела.
![]()
Вы используете блок Rigid Transform, чтобы задать вращательное, поступательное, или смешали твердое преобразование между системами координат. Преобразования направлены. Они устанавливают вращение и перевод системы координат, известной как последователя относительно системы координат, известной как основу.
Метки порта системы координат на блоке Rigid Transform идентифицируют базу и последующую систему координат. Система координат, соединенная с портом B, служит основой. Система координат, соединенная с портом F, служит последователем. Инвертирование подключений порта инвертирует направление, в которое система координат преобразовывают, применяется.
Можно задать преобразование с помощью различных методов. Для вращательных преобразований они включают пары угла оси, матрицы вращения и последовательности вращения. Для поступательных преобразований они включают поступательные векторы смещения, заданные в системы Декартовой или цилиндрической координаты.
Если вращательные и поступательные преобразования равны нулю, связанные системы координат являются совпадающими в пространстве. Это отношение известно как идентичность, и это эквивалентно прямой линии связи между портами системы координат — т.е. один без блока Rigid Transform.
Можно визуализировать системы координат и исследовать преобразования между системами координат с помощью панели визуализации блока Solid или Mechanics Explorer. Используйте панель визуализации блока Solid, чтобы исследовать системы координат одного твердого элемента. Нажмите кнопку Toggle visibility of frames в панели инструментов визуализации, чтобы показать все твердые системы координат.
Система координат на теле

Используйте Mechanics Explorer, чтобы визуализировать системы координат больше, чем один твердый элемент — например, в составных телах, подсистемах мультитела или полных моделях мультитела. Выберите View> Show Frames в меню Mechanics Explorer, чтобы показать все системы координат. Выберите узел из области просмотра в виде дерева, чтобы показать только те системы координат, принадлежащие выбранному компоненту.
Системы координат на теле
В этом примере показано, как возместить два твердых частиц друг относительно друга путем указывания, что система координат преобразовывает между твердыми системами координат. Это показывает три типа преобразований: перевод, вращение и объединенное преобразование.
Создайте модель с двумя твердыми частицами
В командной строке MATLAB® введите smnew. Шаблон модели Simscape™ Multibody™ с обычно используемыми блоками открывается.
Удалите Simulink-PS Converter, PS-Simulink Converter и блоки Scope, потому что они не используются в этом примере.
Покажите имена блоков Brick Solid и Rigid Transform. Щелкните правой кнопкой по блокам и выберите Format> Show Block Name> On.
Сделайте копию блока Brick Solid и переименуйте Кирпичные Твердые блоки, чтобы Базироваться и Последователь.
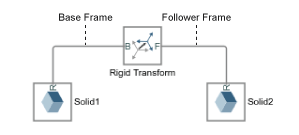
Соедините оставшиеся блоки как следующая фигура.
![]()
Запустите модель. Mechanics Explorer открывается визуализацией модели. В Mechanics Explorer нажмите кнопку Isometric view.
![]()
В области просмотра в виде дерева нажмите Base и узлы Follower. Панель визуализации показывает системы координат двух Кирпичных Твердых блоков, который показывает, что они являются совпадающими в пространстве.
![]()
Примените перевод
Этот раздел показывает, как применить перевод в систему координат последователя при помощи блока Rigid Transform.
Соедините блок Rigid Transform между двумя блоками Brick Solid.
![]()
Дважды кликните блок Rigid Transform. В его диалоговом окне, наборе:
Translation> Method к Cartesian.
Translation> Offset к [1 1 0] m. Элементы массива являются смещениями перевода вдоль базовой системы координат x, y и z - оси.
Нажмите OK, чтобы сохранить настройки и закрыть диалоговое окно Rigid Transform.
Нажмите кнопку Update diagram в Mechanics Explorer, чтобы обновить модель.
В области просмотра в виде дерева кликните по Твердому узлу Преобразования, чтобы показать Базу и последующую систему координат.
![]()
Примените вращение
Этот раздел показывает, как применить вращение вокруг x - ось к системе координат последователя при помощи блока Rigid Transform.
В диалоговом окне блока Rigid Transform, наборе:
Translation> Method к None. Никакой перевод не задан здесь.
Rotation> Method к Standard Axis.
Rotation> Axis к +X. x - ось является осью вращения.
Rotation> Angle к 45 градус.
Нажмите OK и обновите блок-схему.
В области просмотра в виде дерева кликните по узлу Rigid Transform. Следующий рисунок показывает процесс и конечный результат вращения. В конечном результате подсвечено тело кирпича Последователя.
![]()
Примените объединенное преобразование
Этот раздел показывает, как применить объединенное преобразование, которое включает перевод и вращение к системе координат последователя при помощи блока Rigid Transform.
В диалоговом окне блока Rigid Transform, наборе:
Translation> Method к Cartesian.
Translation> Offset к [1 1 0].
Rotation> Method к Standard Axis.
Rotation> Axis к +X. x - ось является осью вращения.
Rotation> Angle к 45 градус.
Нажмите OK и обновите блок-схему.
В области просмотра в виде дерева кликните по узлу Rigid Transform. Следующий рисунок показывает процесс и конечный результат объединенного преобразования.
![]()
Когда и вращательные и поступательные преобразования заданы в блоке Rigid Transform, блок всегда применяется, перевод в последователя структурируют сначала. Переводы описывают, как система координат последователя перемещена относительно ее базовой системы координат. Любые вращения вокруг осей базовой системы координат всегда относительно осей переведенной базовой системы координат.
