Реализуйте бесщеточный диск двигателя постоянного тока с помощью Постоянного магнита синхронного двигателя (PMSM) с трапециевидной противоэлектродвижущей силой (BEMF)
Simscape / Электрический / Специализированные Энергосистемы / Электроприводы / Диски AC
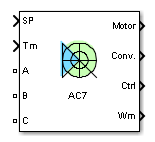
Блок Brushless DC Motor Drive (AC7) представляет стандарт управляемый текущим образом диск для бесщеточного DC (BLDC) двигатели. Двигатели BLDC также известны как постоянный магнит синхронные двигатели с трапециевидной обратной эдс. Этот диск показывает регулировку скорости с обратной связью через статор текущее управление, с помощью датчиков Холла. Цикл регулировки скорости выводит ссылочный электромагнитный крутящий момент машины. Ссылочные токи фазы статора, соответствующие крутящему моменту, которым управляют, выведены на основе постоянного крутящего момента машины и сигналы датчика Холла. Ссылочные токи фазы затем используются, чтобы получить необходимые сигналы логического элемента для инвертора через гистерезисную полосу текущий контроллер.
Основным преимуществом этого диска по сравнению с управляемым напряжением, инвертора PWM диски BLDC, является свой сглаженный динамический ответ. Этот диск предусматривает свойственную current/torque-limiting возможность во время моторного запуска и ускорения. Однако, чтобы действовать правильно, диск требует управления крутящим моментом цикла завершения на основе текущих сигналов машины.
В программном обеспечении Simscape™ Electrical™ Specialized Power Systems блок Brushless DC Motor Drive обычно называется AC7 электропривод.
Блок Brushless DC Motor Drive использует эти блоки из библиотеки Electric Drives / Fundamental Drive Blocks:
Контроллер скорости (AC)
Текущий контроллер (бесщеточный DC)
Шина DC
(Трехфазный) инвертор
Модель дискретна. Хорошие результаты симуляции были получены с 2 µ s временной шаг. Чтобы симулировать цифровое устройство контроллера, система управления имеет два различного времени выборки:
Контроллер скорости время выборки
Текущее время выборки контроллера
Контроллер скорости время выборки должен быть кратным текущему времени выборки контроллера. Последнее время выборки должно быть кратным шагу времени симуляции. Инвертор среднего значения позволяет использование больших шагов времени симуляции, поскольку это не генерирует небольшие постоянные времени (из-за демпферов RC) свойственный к подробному конвертеру. В течение текущего времени выборки контроллера 40 µ s, хорошие результаты симуляции были получены для шага времени симуляции 40 µ s. Шаг времени симуляции не может быть выше, чем текущий временной шаг контроллера.
Выберите, как выходные переменные организованы. Если вы выбираете Multiple output buses (значение по умолчанию), блок имеет три отдельных выходных шины для двигателя, конвертера и переменных контроллера. Если вы выбираете Single output bus, все переменные выводятся на одной шине.
Выберите между подробным и инвертором среднего значения. Значением по умолчанию является Detailed.
Выберите между крутящим моментом загрузки, частотой вращения двигателя и портом вращательного механического устройства как механический вход. Значением по умолчанию является Torque Tm.
Если вы выбираете и применяете крутящий момент загрузки, выход является частотой вращения двигателя согласно следующему дифференциальному уравнению, которое описывает механическую системную динамику:
Эта механическая система включена в модель электродвигателя.
Если вы выбираете частоту вращения двигателя как механический вход, то вы получаете электромагнитный крутящий момент, как выведено, позволяя вам представлять внешне механическую системную динамику. Внутренняя механическая система не используется с этим механическим входным выбором и инерцией, и вязкие параметры трения не отображены.
Для порта вращательного механического устройства порт подключения S значит механический ввод и вывод. Это позволяет прямую связь со средой Simscape. Механическая система двигателя также включена в диск и основана на том же дифференциальном уравнении.
Смотрите механическую связь двух электроприводов.
Когда вы устанавливаете этот флажок, Motorconv, и Ctrl измерение выходные параметры использует имена сигнала, чтобы идентифицировать метки шины. Выберите эту опцию для приложений, которые требуют, чтобы метки сигнала шины имели только алфавитно-цифровые символы.
Когда этот флажок снимается (значение по умолчанию), измерение, выход использует определение сигнала, чтобы идентифицировать метки шины. Метки содержат неалфавитно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink®.
Когда вы устанавливаете этот флажок, частота вращения двигателя и положение оцениваются от терминальных напряжений и токов с помощью наблюдателя обратной эдс. Сигналы коммутаций (эквивалентный сигналам эффекта Холла) сгенерированы от положения ротора каждые 60 электрических градусов. Вкладка Sensorless содержит параметры усилений наблюдателя.
Когда этот флажок снимается, частота вращения двигателя измеряется внутренним датчиком скорости, и вкладка Sensorless не отображена на маске блока.
Вкладка Permanent Magnet Synchronous Machine отображает параметры блока Permanent Magnet Synchronous Machine Основных Блоков (powerlib) библиотека.
Раздел Rectifier вкладки Converters and DC Bus отображает параметры блока Universal Bridge Основных Блоков (powerlib) библиотека. Для получения дополнительной информации о параметрах Универсэл-Бридж обратитесь к странице с описанием Универсэл-Бридж.
Емкость шины DC (F). Значением по умолчанию является 2000e-6.
Тормозящее сопротивление прерывателя раньше избегало повышенного напряжения шины во время моторного замедления или когда крутящий момент загрузки имеет тенденцию ускорять двигатель (Омы). Значением по умолчанию является 8.
Тормозящая частота прерывателя (Гц). Значением по умолчанию является 4000.
Динамическое торможение активируется, когда напряжение на шине достигает верхнего предела гистерезисной полосы. Следующая фигура иллюстрирует тормозящую логику гистерезиса прерывателя. Значением по умолчанию является 320.
Динамическое торможение закрывается, когда напряжение на шине достигает нижнего предела гистерезисной полосы. Значением по умолчанию является 310. Логику гистерезиса прерывателя показывают в следующем рисунке.
Раздел Inverter вкладки Converters and DC Bus отображает параметры блока Universal Bridge Основных Блоков (powerlib) библиотека. Для получения дополнительной информации о параметрах Универсэл-Бридж обратитесь к странице с описанием Универсэл-Бридж.
Инвертор среднего значения использует следующий параметр.
Сопротивление на состоянии переключателей инвертора (Омы). Значением по умолчанию является 1e-3.
Это всплывающее меню позволяет вам выбирать между регулированием крутящего момента и скоростью. Значением по умолчанию является Speed regulation.
Когда вы нажимаете эту кнопку, схема, иллюстрирующая скорость и текущую схематику контроллеров, появляется.
Максимальное изменение скорости позволено во время моторного ускорения (об/мин/с). Чрезмерно большое положительное значение может вызвать пониженное напряжение шины DC. Этот параметр используется в режиме регулирования скорости только. Значением по умолчанию является 1000.
Максимальное изменение скорости позволено во время моторного замедления (об/мин/с). Чрезмерно большая отрицательная величина может вызвать повышенное напряжение шины DC. Этот параметр используется в режиме регулирования скорости только. Значением по умолчанию является -1000.
Первый порядок измерения скорости частота среза фильтра lowpass (Гц). Этот параметр используется в режиме регулирования скорости только. Значением по умолчанию является 100.
Контроллер скорости время (время) выборки. Время выборки должно быть кратным шагу времени симуляции. Значением по умолчанию является 7*20e-6.
Контроллер скорости пропорциональное усиление. Этот параметр используется в режиме регулирования скорости только. Значением по умолчанию является 5.
Контроллер скорости интегральное усиление. Этот параметр используется в режиме регулирования скорости только. Значением по умолчанию является 100.
Максимальный отрицательный потребованный крутящий момент применился к двигателю текущим контроллером (N.m). Значением по умолчанию является -17.8.
Максимальный положительный потребованный крутящий момент применился к двигателю текущим контроллером (N.m). Значением по умолчанию является 17.8.
Текущее время (время) выборки контроллера. Время выборки должно быть кратным шагу времени симуляции. Значением по умолчанию является 20e-6.
Текущая гистерезисная пропускная способность. Это значение является общей пропускной способностью, распределенной симметрично вокруг текущего сетбола (A). Следующая фигура иллюстрирует случай, где текущий сетбол*, и текущая гистерезисная пропускная способность установлена в дуплекс. Значением по умолчанию является 0.01.
Этот параметр не используется при использовании инвертора среднего значения.
Эта пропускная способность может быть превышена, потому что симуляция фиксированного шага используется. Блок перехода уровня требуется, чтобы передавать данные между различными уровнями выборки. Этот блок вызывает задержку сигналов логических элементов, таким образом, ток может превысить гистерезисную полосу.
Максимальный инвертор, переключающий частоту (Гц). Этот параметр не используется при использовании инвертора среднего значения. Значением по умолчанию является 20e3.
Щелкните, чтобы показать или скрыть параметры инструмента Autotuning Control.
Задайте фактор затухания, используемый в вычислении усилений Кп и Ки блока Speed Controller (AC). Фактор затухания задан как
Собственная частота определяется следующими эмпирическими уравнениями:
Если ζ <0.69
Если ζ ≥ 0.69
В уравнении Trd соответствует параметру Desired response time @ 5%. Значением по умолчанию является 0.99.
Задайте желаемое время урегулирования блока Speed Controller (AC). Это - время, требуемое для ответа контроллера достигнуть и остаться в 5-процентной области значений целевого значения. Значением по умолчанию является 0.13/5.
Вычислите Proportional gain и параметры Integral gain блока Speed Controller (AC) на основе параметры Desired response time @ 5% и Desired damping [zeta]. Вычисленные значения отображены в маске блока Drive. Нажмите Apply или OK, чтобы подтвердить их.
d - усиление оси наблюдателя получает матрицу.
Значением по умолчанию является 3000.
q - усиление оси наблюдателя получает матрицу.
Значением по умолчанию является -49500.
SPСкорость или сетбол крутящего момента. Сетбол скорости может быть ступенчатой функцией, но уровень изменения скорости будет следовать за ускорением / пандусы замедления. Если крутящий момент загрузки и скорость будут иметь противоположные знаки, ускоряющийся крутящий момент будет суммой электромагнитных крутящих моментов и крутящих моментов загрузки.
Tm или WmМеханический вход: загрузите крутящий момент (TM) или частота вращения двигателя (Wm). Для порта вращательного механического устройства (S), удален этот вход.
A, B, C Три терминала фазы электропривода.
Wmte или SМеханический выход: частота вращения двигателя (Wm), электромагнитный крутящий момент (Те) или порт вращательного механического устройства (S).
Когда параметр Output bus mode устанавливается на Multiple output buses, блок имеет следующие три выходных шины:
MotorМоторный вектор измерения. Этот вектор позволяет вам наблюдать переменные двигателя с помощью блока Селектора Шины.
ConvТрехфазный вектор измерения конвертеров. Этот вектор содержит:
Напряжение на шине DC
Выпрямитель текущий выход
Текущий вход инвертора
Все текущие значения и значения напряжения мостов могут визуализироваться с блоком Multimeter.
CtrlВектор измерения контроллера. Этот вектор содержит:
Ссылка крутящего момента
Скоростная погрешность (различие между ссылкой скорости сползают и фактическая скорость),
Пандус ссылки скорости или ссылка крутящего момента
Когда параметр Output bus mode устанавливается на Single output bus, блок группирует Двигатель, Conv и Ctrl выходные параметры в одну шину выход.
Библиотека содержит набор параметра диска на 3 л. с. Технические требования диска на 3 л. с. показывают в следующей таблице.
3 HP Drive Specifications
Управляйте входным напряжением | ||
|---|---|---|
Амплитуда | 220 В | |
Частота | 60 Гц | |
Моторная номинальная стоимость | ||
Степень | 3 л. с. | |
Скорость | 1 650 об/мин | |
Напряжение | 300 В постоянного тока |
ac7_example пример иллюстрирует симуляцию электропривода AC7 со стандартным условием загрузки.
[1] Bose, B. K. Современная силовая электроника и диски AC. Верхний Сэддл-Ривер, NJ: Prentice Hall, 2002.
[2] Краузе, P. C. Анализ электрического машинного оборудования. Нью-Йорк: McGraw-Hill, 1986.
[3] Tremblay, О. Моделисэйшн, симуляция и команда de la машина synchrone à aimants à force contre-électromotrice trapézoïdale. Монреаль, Канада: École de Technologie Supérieure, 2006.
