Дискретное время Бесщеточный двигатель постоянного тока текущий ПИ-контроллер
Simscape / Электрический / Управление / Управление BLDC

Блок BLDC Current Controller использует этот алгоритм, чтобы управлять текущий в DC бесщеточный двигатель.
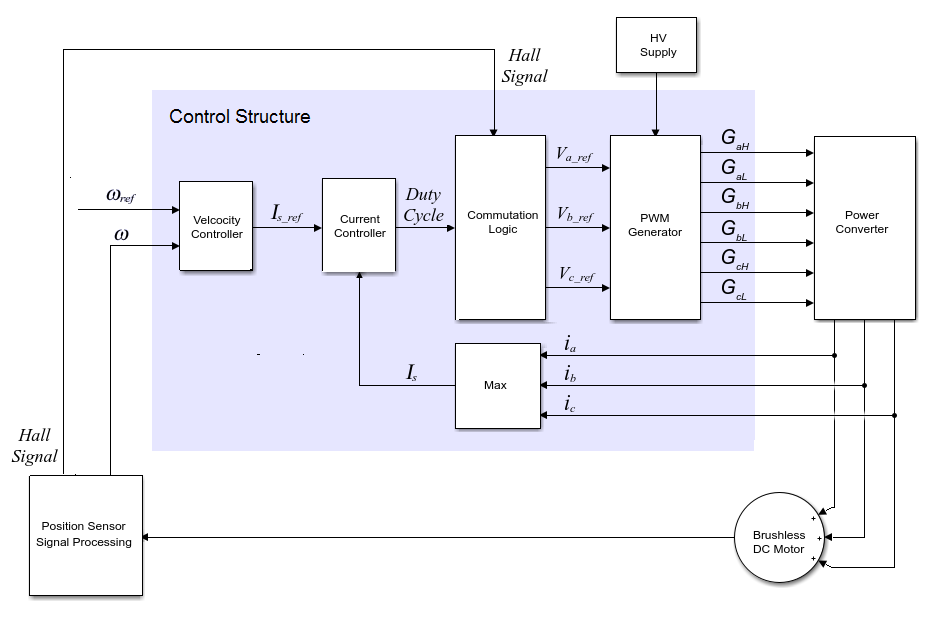
BLDC Current Controller производит рабочий цикл для блока BLDC путем реализации пропорционального интеграла (PI) текущее управление с помощью этого уравнения.
Где:
D является рабочим циклом.
Kp является пропорциональным усилением.
Ki является интегральным усилением.
Ts является периодом времени.
Is_ref является ссылочным током.
Is является измеренным током.
Gzc является нулевым полиномом отмены.
Передаточная функция с обратной связью для алгоритма управления PI дает к нулю, который может быть отменен при помощи нулевой отмены в пути feedforward. Передаточная функция нулевой отмены в дискретное время:
Блок получает управляющие сигналы для этих трех фаз путем умножения рабочего цикла на коммутационные сигналы. Получившиеся три управляющих сигнала нормированы на интервале [-1, 1].
[1] Stirban, A. i. Boldea и Г. Д. Андриску. "Управление движения-Sensorless BLDC-электродвигателя-с-постоянными-магнитами С Оффлайновым Наблюдателем Положения и Скорости FEM-Information-Assisted". Транзакции IEEE на Промышленных Приложениях. 48, № 6 (2012): 1950-1958.

