Дискретное время на модуль однофазная машина индукции, ориентированная на поле на управление
Simscape / Электрический / Управление / Управление Машиной Индукции

Блок Induction Machine Field-Oriented Control (Single-Phase) реализует однофазную машину индукции, ориентированную на поле на управляющую структуру.
Ориентированная на поле архитектура управления для однофазной машины индукции:
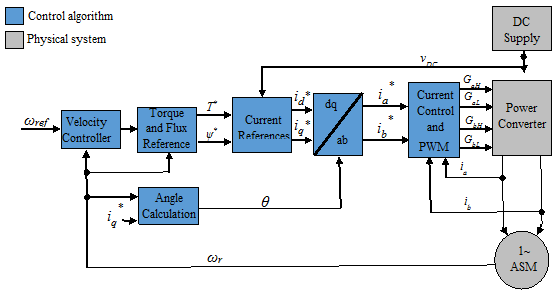
Можно обеспечить ссылку крутящего момента как вход, или, в случае регулировки скорости, сгенерировать ссылку внутренне с помощью контроллера скорости PI. Ссылка крутящего момента, как выведено от диспетчера скорости PI:
где ωr является ротором угловая механическая скорость в rad/s.
Блок генерирует ссылку потока как
где:
p является количеством пар полюса.
fn является расчетной частотой.
ψn является расчетным потоком.
Текущие ссылки получены из параметров машины:
где:
Lms является основной извилистой взаимной индуктивностью.
Llar является основной извилистой индуктивностью утечки ротора.
a является вспомогательным-к-основному отношением поворота обмоток.
Угол вычисляется путем решения:
Преобразование к стационарной системе координат сделано при помощи:
Управляющая структура реализована в одной частоте дискретизации.
[1] Корреа, M. B. R., Жакобина, C. B., Лима, утра N., Да Силва, E. R. C. "Поле Ориентированное Управление Однофазного Диска Асинхронного двигателя". Запись PESC 98. 29-я Ежегодная Конференция специалистов по Силовой электронике IEEE. Издание 2, 1998, стр 990 - 996.
