Скоростной контроллер дискретного времени
Simscape / Электрический / Управление / Общее Управление Машиной

Блок Velocity Controller реализует скоростной контроллер в дискретное время.
Вы обеспечиваете измеренные и ссылочные скорости ротора (w и wref) как входные параметры с блоком. Блок затем выводит ссылочный крутящий момент Tref для электропривода.
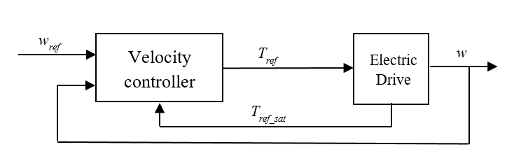
Чтобы предотвратить завершение в интеграторе, питайте влажный ссылочный крутящий момент Tref_sat от электропривода назад скоростному контроллеру.
Можно управлять скоростью вращения ротора с дискретным шагом расчета Ts с помощью одного из трех общих подходов:
Управление пропорциональным интегралом (PI), с пропорциональными и интегральными усилениями Kp_w и Ki_w:
Пропорциональный (P) управление, с пропорциональным усилением Kp_w:
Управление PPI, охарактеризованное двойной скоростной обратной связью как показано в следующем рисунке:
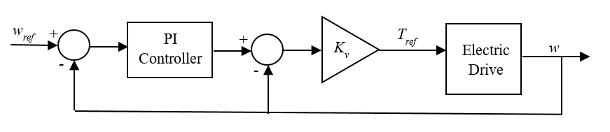
Здесь, блок PI Controller структурирован как в стратегии управления PI, и Kv является пропорциональным усилением для контроллера P.
Используя результаты управления PI в нуле в передаточной функции с обратной связью, которая может привести к нежелательному перерегулированию в ответе с обратной связью. Этот нуль может быть отменен путем представления блока нулевой отмены в пути feedforward. Нулевая передаточная функция отмены в дискретное время
Control type — Модель управленияPI control (значение по умолчанию) | P control | P-PI controlТип контроллера:
PI control — Пропорционально-интегральное управление с помощью одной обратной связи
P control — Пропорционально-интегральное управление с помощью одной обратной связи
P-PI control — Пропорциональное и пропорционально-интегральное управление с помощью двойной обратной связи
Опции Control type влияют на видимость или конфигурируемость этих параметров:
Controller integral gain
P controller proportional gain
Anti-windup gain
Integral anti-windup gain
Sample time (-1 for inherited)
Enable zero cancellation
Controller proportional gain — Пропорциональное усилениеПропорциональное усиление для:
ПИ-контроллер
P контроллер в одноконтурной модели управления
ПИ-контроллер в контроллере PPI
Controller integral gain — Интегральное усилениеИнтегральное усиление для PI или контроллера PPI.
Этот параметр отображается только, когда Control type установлен в PI control или P-PI control.
P controller proportional gain — P пропорциональное усилениеПропорциональное усиление для контроллера P в контроллере PPI.
Этот параметр отображается только, когда Control type установлен в P-PI control.
Integral anti-windup gain — Антизаключительное усиление PIАнтизаключительное усиление для ПИ-контроллера.
Этот параметр отображается только, когда Control type установлен в PI control или P-PI control.
Sample time (-1 for inherited) — Блокируйте шаг расчетаВремя, в s, между последовательным выполнением блока. Во время выполнения блок производит выходные параметры и, при необходимости обновляет его внутреннее состояние. Для получения дополнительной информации смотрите то, Что Шаг расчета? (Simulink) и Настройка времени выборки (Simulink).
Если этот блок в инициированной подсистеме, наследуйте шаг расчета путем установки этого параметра на -1. Если этот блок находится в модели шага непрерывной переменной, задайте шаг расчета явным образом с помощью положительной скалярной величины.
Этот параметр отображается только, когда Control type установлен в PI control или P-PI control.
Discretization sample time — Шаг расчета для дискретизацииВремя, в s, между последовательными дискретизациями. Дискретизация требуется для нулевой отмены.
Этот параметр только отображается, когда все эти условия соблюдают:
Control type установлен в PI control или P-PI control.
Sample time установлен в -1.
Enable zero cancellation выбран![]() .
.
Enable zero cancellation — Нулевая отмена Feedforwardoff (значение по умолчанию) | onОпция, чтобы использовать нулевую отмену на пути feedforward.
Параметр Enable zero cancellation отображается только, когда Control type установлен в PI control или P-PI control.
Параметр Discretization sample time только отображается, когда Enable zero cancellation выбран![]() .
.
[1] Naouar, M. W. А. А. Нэассани, Э. Монмэссон и я. Slama-Belkhodja. "Основанный на FPGA прогнозирующий текущий контроллер для синхронного диска скорости машины". Транзакции IEEE на Силовой электронике. Издание 23, Номер 4, 2008, стр 2115–2126.



