В Simulink® можно включать одну модель в другой модели использования, ссылающейся (см. Основы Модели - ссылки (Simulink)). При использовании PID Tuner или Frequency Response Based PID Tuner, чтобы настроить блок ПИД-регулятора в модели, на которую ссылаются, существуют некоторые ограничения, чтобы знать.
В общем случае можно настроить блок ПИД-регулятора в модели, на которую ссылаются, с помощью или PID Tuner или Frequency Response Based PID Tuner. Когда вы открываете или тюнер, программное обеспечение предлагает вам задавать который модель использовать в качестве модели верхнего уровня для линеаризации и настраивающийся (PID Tuner) или оценку и настраивающийся (Frequency Response Based PID Tuner). Например, рассмотрите модель model_ref_pid.
open('model_ref_pid');
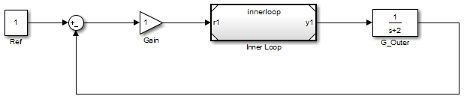
Блок Inner Loop модель, на которую ссылаются, которая содержит блок контроллера, чтобы настроиться. Откройте модель, на которую ссылаются.
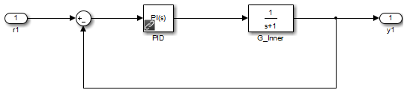
Inner Loop содержит блок PID controller, PID. Открытый тот блок. В Select Tuning Method выпадающий список выберите Transfer Function Based (PID Tuner App), и нажмите Tune, чтобы открыть PID Tuner. Программное обеспечение предлагает вам выбирать, какая открытая модель является моделью верхнего уровня для линеаризации и настройки. (Выбор Frequency Response Based открыть Frequency Response Based PID Tuner приводит к подобной подсказке.)
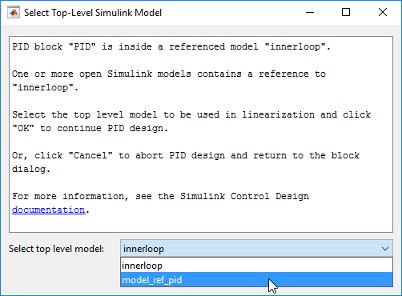
Доступный выбор для модели верхнего уровня включает саму модель, на которую ссылаются плюс любая открытая модель в который модель, на которую ссылаются:
Появляется точно однажды, и
Сконфигурирован для нормального режима симуляции.
Настраивающие инструменты не обнаруживают модели, которые содержат модель - ссылку, но не открыты.
Выбор innerloop заставляет тюнер игнорировать model_ref_pid. Вместо этого тюнер настраивает блок PID Controller для объекта G_Inner один, как будто не было никакого внешнего цикла.
В качестве альтернативы можно выбрать model_ref_pid как модель верхнего уровня. Когда вы делаете так, тюнер рассматривает динамику и внутренних и внешних циклов и настраивается с обоими замкнутыми кругами. В этом случае ПИД-регулятор видит эффективный объект (1+G_Outer*Gain)*G_Inner.
Выберите желаемую модель верхнего уровня и нажмите OK. Тюнер, который вы выбрали с Select Tuning Method, открывается для настройки заданной модели верхнего уровня.
Иногда, настройка может продолжить, когда модель, на которую ссылаются, появляется многократно в открытой модели. Если следующим условиям отвечают, можно настроить блок ПИД-регулятора, с помощью модели, на которую ссылаются, в качестве модели верхнего уровня:
Единственные открытые модели, которые содержат модель - ссылку, имеют несколько экземпляров ее, и
По крайней мере один из этих экземпляров находится в режиме normal mode.
Когда это условие происходит, программное обеспечение выдает предупреждение. В этом случае, потому что тюнер может только настроиться относительно модели, на которую ссылаются, вы не можете задать модель верхнего уровня.
Если нет никакого экземпляра режима normal mode модели, на которую ссылаются, ни в какой открытой модели, настройка не может продолжить. В этом случае программное обеспечение выдает ошибку. Чтобы настроить блок ПИД-регулятора, преобразуйте некоторый экземпляр модели, на которую ссылаются, в открытой модели к нормальному режиму симуляции.
