Рабочая точка динамической системы задает состояния и входные сигналы корневого уровня модели в определенное время. Например, в автомобильной модели механизма, переменные, такие как скорость вращения двигателя, угол дросселя, температура механизма, и окружающий атмосферные условия обычно описывает рабочую точку.
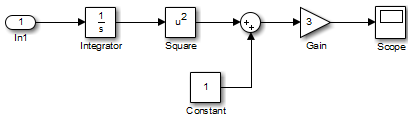
Следующая модель Simulink® имеет рабочую точку, которая состоит из двух переменных:
Набор входного сигнала корневого уровня к 1
Набор состояния блока Integrator к 5
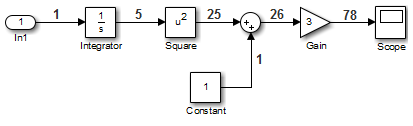
Следующая таблица обобщает значения сигналов для модели в этой рабочей точке.
| Блок | Вход блока | Блочная операция | Блок Выход |
|---|---|---|---|
| Integrator | 1 | Вход Integrate | 5x0 = 5 |
| Square | 5 | Квадратный вход | 25 |
| Sum | 251 от блока Constant | Суммируйте входные параметры | 26 |
| Gain | 26 | Умножьте вход на 3 | 78 |
Следующая блок-схема показывает, как вход модели и начальное состояние блока Integrator распространяют через модель в процессе моделирования.
Если ваши начальные состояния модели и входные параметры уже представляют желаемые установившиеся условия работы, можно использовать эту рабочую точку в линеаризации или системе управления.
Установившаяся рабочая точка модели, также названной равновесием или условием для обрезки, включает переменные состояния, которые не изменяются со временем.
Модель может иметь несколько установившихся рабочих точек. Например, ослабленный маятник зависания имеет две установившихся рабочих точки, в которых положение маятника не изменяется со временем. Устойчивая установившаяся рабочая точка происходит, когда маятник висит прямо вниз. Когда положение маятника отклоняется немного, маятник всегда возвращается к равновесию. Другими словами, небольшие изменения в рабочей точке не заставляют систему покидать область хорошего приближения вокруг значения равновесия.
Нестабильная установившаяся рабочая точка происходит, когда маятник указывает вверх. Пока маятник указывает точно вверх, это остается в равновесии. Однако, когда маятник отклоняется немного от этого положения, он качается вниз, и рабочая точка покидает область вокруг значения равновесия.
При использовании поиска оптимизации, чтобы вычислить рабочие точки для нелинейных систем, ваши исходные предположения для состояний и уровней на входе должны быть около желаемой рабочей точки, чтобы гарантировать сходимость.
При линеаризации модели с несколькими установившимися рабочими точками важно иметь правильную рабочую точку. Например, линеаризация модели маятника вокруг устойчивой установившейся рабочей точки производит устойчивую линейную модель, тогда как линеаризация вокруг нестабильной установившейся рабочей точки производит нестабильную линейную модель.
В программном обеспечении Simulink Control Design™ рабочая точка для модели Simulink представлена рабочей точкой (operpointобъект. Объектно-ориентированная память настраиваемые состояния модели и их значения, наряду с другими данными о рабочей точке. Состояния блоков, которые имеют внутреннее представление, такое как Backlash, Memory и блоки Stateflow®, исключены.
Состояния, которые исключены из объекта рабочей точки, не могут использоваться в обрезке расчетов. Эти состояния не могут быть получены с operspec или operpoint, или записанный с initopspec. Такие состояния также исключены из отображений рабочей точки или расчетов с помощью Model Linearizer. Следующая таблица подводит итог, какие состояния включены и которые исключены из объекта рабочей точки.
| Тип состояния | Включенный в рабочую точку? |
|---|---|
| Состояния с действительным знаком с двойной точностью | Да |
Состояния, значение которых не имеет типа double. Например, состояния с комплексным знаком, single- введите состояния, int8- введите состояния. | Нет |
| Состояния от корневого уровня импортируют блоки с входными параметрами с действительным знаком с двойной точностью | Да |
| Представления внутреннего состояния, которые влияют, блокируют выход, такой как состояния в Backlash, Memory или блоках Stateflow. | Нет (см. блоки указателя с представлением внутреннего состояния), |
| Состояния, которые принадлежат блоку Unit Delay, вход которого является сигналом шины | Нет |
